System
You can implement various features related to the System framework and the file system.
Partition and file system
The following description is an example of the Tizen partition layout. Product vendors can modify the sequence or partition layout for their devices, as needed.
- The
bootpartition includes the kernel image, boot-loader image, and modem image. It can also contain device driver modules. - The
rootfspartition is mounted on the root directory. It contains the fundamental frameworks for Tizen and some general utilities for Linux. - The
system-datapartition is mounted on the/optdirectory. It contains the platform database and platform configurations. - The
userpartition can be mounted on the/opt/usrdirectory separately. It contains user-installed applications. - External storages are mounted on
/opt/media. - The partition image files (
rootfs.img,system-data.img, anduser.img) can be zipped for downloading, such as<IMAGE_NAME>.tar.gz.
The /etc/fstab directory must be modified or the systemd mount units must be added based on the partition layout. Consequently, the fstab file or system mount unit files for specific devices must be added to the system-plugin Git repository. The following example shows an fstab file:
/dev/root / ext4 defaults,noatime 0 1
LABEL=system-data /opt ext4 defaults,noatime 0 2
LABEL=user /opt/usr ext4 defaults,noatime 0 3
Supported file systems
Tizen supports the Extended 4 (Ext 4) file system as the default file system.
To enable support for other file systems, such as JFS, XFS, BTRFS, and ReiserFS, the Tizen kernel must be modified and compiled. The following configuration options must be enabled in the kernel configuration file:
CONFIG_EXT4_FS=yCONFIG_EXT4_FS_XATTR=yCONFIG_EXT4_USE_FOR_EXT23=yCONFIG_EXT4_FS_SECURITY=y
File system hierarchy
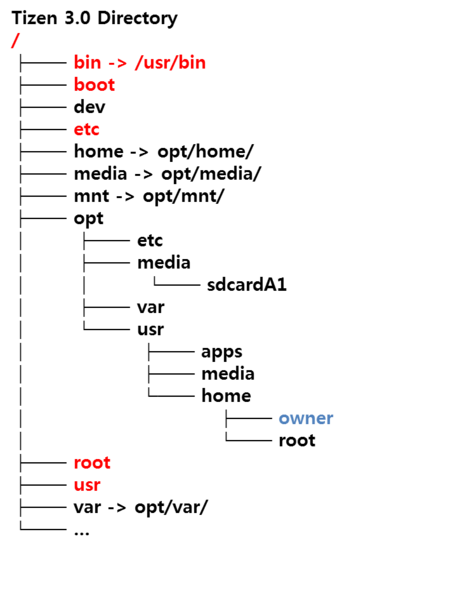
The Tizen directory hierarchy intends to follow the File System Hierarchy Standard (FHS) as much as possible, for compatibility with the Linux world. However, Tizen uses the /opt directory for Tizen-specific purposes: place all RW data in the /opt directory.
Figure: File system hierarchy
Directory macros for accessing the Tizen-specific directories are provided in the Tizen platform configuration metafile. The following table lists some example macros.
Table: Example directory macros
| Directory macro | Real path |
|---|---|
TZ_SYS_DATA |
/opt/data |
TZ_SYS_SHARE |
/opt/share |
TZ_SYS_VAR |
/opt/var |
System framework
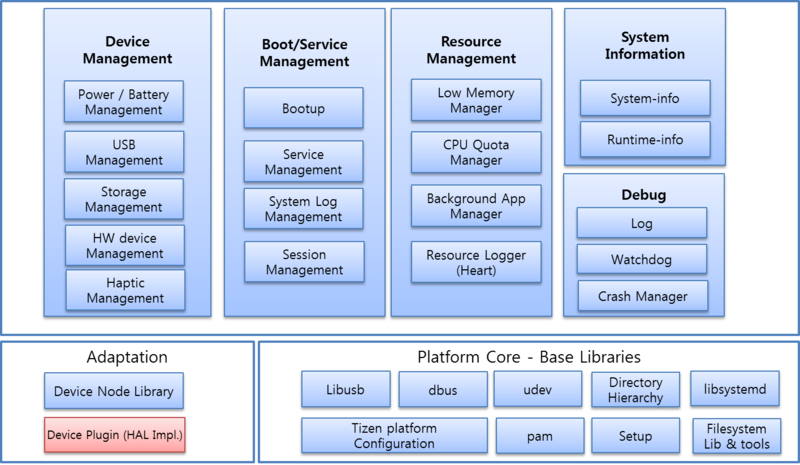
The System framework module abstracts low-level system functions and manages the Tizen system:
-
systemdrequirements for system and service management- Linux Kernel >= 3.4 , Linux Kernel >= 3.8 for Smack support
CONFIG_CGROUPS,CONFIG_TIMERFD,CONFIG_SIGNALFD,CONFIG_EPOLL, …
-
Basic resource requirements (such as CPU, memory) usage management
- Linux Kernel >= 3.10 for
VMPRESSURE, Linux Kernel >= 3.8 forMEMCG SWAP CONFIG_CGROUPS,CONFIG_CGROUP_SCHED,CONFIG_MEMCG,CONFIG_MEMCG_SWAP, …
- Linux Kernel >= 3.10 for
-
devicedrequirements for device and power management- Device HAL layer porting
-
dlog requirements
Select a backend for the target environment and enable the appropriate kernel feature:
- Additional KMSG patch for multiple Kmsg backend
- Android™ logger driver for Android log backend
- Userspace logger daemon
Using the Linux kernel 3.10 or above is recommended.
Figure: System framework
systemd
systemd (ver.219) is a system and service manager for the Tizen system. It provides functionalities, such as parallelized service execution, socket and dbus activation for starting services and daemons, on-demand daemon start-up, service process management using Linux cgroup, automount point support, and service snapshot and restore.
The systemd core manages all units, such as service, socket, and mount. It stores all log data. When you add a new service daemon, you need to provide the proper system units and unit dependencies.
To use systemd, you must enable the cgroup and autofs options in the Linux kernel configuration. It also depends on dbus and some libraries.
resourced
resourced is a daemon that manages system resources, such as memory and CPU.
To use most of the resourced functionalities, you must enable the following cgroup kernel features:
CONFIG_CGROUPS: Base feature.CONFIG_CGROUP_SCHED: Controls the CPU share of applications.CONFIG_MEMCG: Selects the victim in low-memory situations.CONFIG_FREEZER: Freezes background (and idle) applications.CONFIG_MEMCG_SWAP,CONFIG_MEMCG_SWAP_ENABLED: Adds swap management features to memory resource controller. Depends onCONFIG_MEMCGandCONFIG_SWAP.CONFIG_ZRAM: Creates memory-backed compressed block devices /dev/zramX (X = 0, 1, …). Depends onCONFIG_ZSMALLOC.CONFIG_ZRAM_LZ4_COMPRESS: Enables support for an alternative compression algorithm. By default, ZRAM uses Lempel–Ziv–Oberhumer (LZO).CONFIG_ZSWAP: Compresses data in memory before moving them to a storage device.CRYPTO_DEFLATE,CRYPTO_ZLIB,CRYPTO_LZO,CRYPTO_LZ4,CRYPTO_LZ4HC: Compression algorithms available as part of kernel cyrpto API.
NoteTo use the
resourcedfreezer feature, you must install the freezer plugin by enablingCONFIG_FREEZER.
deviced
deviced is a daemon that handles device events, such as the battery level and plug-and-play device status, and provides interfaces to manage devices, such as power, display, and external storages. If your BSP does not provide the Linux kernel-standard interface, these functionalities can require a HAL layer:
- Managing the LCD backlight state (on/off/dim)
- Managing the CPU sleep state and handling requests to lock the CPU from sleeping
- Monitoring external devices, such as USB cable, earjack, and charger
- Monitoring the battery level
- Managing external storages, such as SD card and USB storages
- Controlling the vibrator
- Setting the USB configuration for connecting to a host computer
- Powering off the LED, IR, and other features
- Using the device HAL to handle devices and get events
dlog
Tizen provides 3 logging system backends, these are:
-
Multiple
kmsgbackendRequires a kernel patch. For more information, see https://lwn.net/Articles/677047/.
-
Android-logger backend
Utilizes the Android logger driver.
-
User logger backend
No requirement (you do not have to enable anything from dlog)
Porting the Smart Development Bridge (SDB)
SDB is a device management tool used for remote shell command, file transfer, controlling device log out, and USB debugging.
-
To use SDB, you must install a kernel driver.
For example:
-
To recognize the target as a Tizen device, the SDB interface on the target device must have the following information in the USB interface descriptor:
Class: 0xff SubClass: 0x20 Protocol: 0x02 -
When using multi-configuration, SDB must be located in the first configuration on the target multi-configuration system. The SDB client of the host PC (Linux PC) selects the first configuration.
-
To recognize the USB cable connection, you must port the External Connector Class (
extcon) to the kernel. Ifextconcannot be ported, you can enable SDB using the following shell command:/usr/bin/direct_set_debug.sh --sdb-set
Porting the device HAL interface
The device HAL is applied for the hardware-independent platform. The device HAL consists of libraries corresponding to hardware, such as display, external connector, battery, LED, and IR. The HAL is used by deviced (device daemon) to control hardware, and manages the events of device state changes. deviced opens the implemented libraries and uses the APIs to control the devices.
OEM developers must implement the API defined in the header files of the libdevice-node package and compile their libraries (.so file) for their devices.
The following code snippet shows the device HAL structure:
#define MAKE_TAG_CONSTANT(A,B,C,D) (((A) << 24) | ((B) << 16) | ((C) << 8) | (D))
#define HARDWARE_INFO_TAG MAKE_TAG_CONSTANT('T','H','I','T')
struct hw_common;
struct hw_info {
/* magic must be initialized to HARDWARE_INFO_TAG */
uint32_t magic;
/* HAL version */
uint16_t hal_version;
/* Device version */
uint16_t device_version;
/* Device ID */
const char *id;
/* Device name */
const char *name;
/* Author name */
const char *author;
/* Module's dynamic shared object */
void *dso;
/* Reserved for future use */
uint32_t reserved[8];
/* Open device */
int (*open)(struct hw_info *info, const char *id, struct hw_common **common);
/* Close device */
int (*close)(struct hw_common *common);
};
struct hw_common {
/* Indicate to this device information structure */
struct hw_info *info;
};
Battery HAL
The battery HAL provides functions for getting the battery status. The HAL interface is defined in the hw/battery.h header file of the libdevice-node library, and the pkg-config device-node must be used to use the HAL interface.
The following code snippet shows the battery HAL interface:
/*
Device ID
*/
#define BATTERY_HARDWARE_DEVICE_ID "battery"
#define POWER_SOURCE_NONE "none"
#define POWER_SOURCE_AC "ac"
#define POWER_SOURCE_USB "usb"
#define POWER_SOURCE_WIRELESS "wireless"
/*
Device version
*/
#define BATTERY_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,1)
struct battery_info {
char *name; /* "display" */
char *status; /* "Charging", "Discharging", "Full", "Not charging" */
char *health; /* "Good", "Cold", "Dead", "Overheat", "Over voltage" */
char *power_source; /* "ac", "usb", "wireless" */
int online; /* 0 ~ */
int present; /* 0 or 1 */
int capacity; /* 0 ~ 100 */
int current_now; /* Current (uA). Positive value if power source is connected, negative value if power source is not connected */
int current_average; /* Average current (uA). Positive value if power source is connected, negative value if power source is not connected */
};
typedef void (*BatteryUpdated)(struct battery_info *info, void *data);
struct battery_device {
struct hw_common common;
/* Register battery event */
int (*register_changed_event)(BatteryUpdated updated_cb, void *data);
void (*unregister_changed_event)(BatteryUpdated updated_cb);
/* Get current states */
int (*get_current_state)(BatteryUpdated updated_cb, void *data);
};
The following table lists the battery HAL functions.
Table: Battery HAL functions
| Function prototype | Description | Mandatory |
|---|---|---|
int (*register_changed_event)(BatteryUpdated updated_cb, void *data); |
Adds a callback function which is called when battery status changes. | Yes |
void (*unregister_changed_event)(BatteryUpdated updated_cb); |
Removes the callback function added for the battery status event. | Yes |
int (*get_current_state)(BatteryUpdated updated_cb, void *data); |
Calls the function specified in the first parameter. The battery information is delivered to the function parameter. | Yes |
The following code snippet shows an example of the battery HAL:
#define BATTERY_ROOT_PATH "/sys/class/power_supply"
static int
get_power_source(char **src) {
int ret, val;
ret = sys_get_int(BATTERY_ROOT_PATH"/"POWER_SOURCE_AC"/online", &val);
if (ret >= 0 && val > 0) {
*src = POWER_SOURCE_AC;
return 0;
}
ret = sys_get_int(BATTERY_ROOT_PATH"/"POWER_SOURCE_USB"/online", &val);
if (ret >= 0 && val > 0) {
*src = POWER_SOURCE_USB;
return 0;
}
ret = sys_get_int(BATTERY_ROOT_PATH"/"POWER_SOURCE_WIRELESS"/online", &val);
if (ret >= 0 && val > 0) {
*src = POWER_SOURCE_WIRELESS;
return 0;
}
*src = POWER_SOURCE_NONE;
return 0;
}
static int
battery_get_current_state(BatteryUpdated updated_cb, void *data) {
int fd;
struct battery_info info;
char status[32];
char health[32];
char *power_source;
if (!updated_cb)
return -EINVAL;
info.name = BATTERY_HARDWARE_DEVICE_ID;
fd = open(BATTERY_ROOT_PATH"/battery/status", O_RDONLY);
read(fd, status, sizeof(status));
close(fd);
info.status = status;
fd = open(BATTERY_ROOT_PATH"/battery/health", O_RDONLY);
read(fd, health, sizeof(health));
close(fd);
info.health = health;
....
get_power_source(&power_source);
info.power_source = power_source;
updated_cb(&info, data);
return 0;
}
static int
battery_open(struct hw_info *info, const char *id, struct hw_common **common) {
struct battery_device *battery_dev;
battery_dev = calloc(1, sizeof(struct battery_device));
battery_dev->common.info = info;
battery_dev->register_changed_event = battery_register_changed_event;
battery_dev->unregister_changed_event = battery_unregister_changed_event;
battery_dev->get_current_state = battery_get_current_state;
*common = (struct hw_common *)battery_dev;
return 0;
}
static int
battery_close(struct hw_common *common) {
free(common);
return 0;
}
HARDWARE_MODULE_STRUCTURE = {
.magic = HARDWARE_INFO_TAG,
.hal_version = HARDWARE_INFO_VERSION,
.device_version = BATTERY_HARDWARE_DEVICE_VERSION,
.id = BATTERY_HARDWARE_DEVICE_ID,
.name = "battery",
.open = battery_open,
.close = battery_close,
};
Display HAL
The display HAL provides functions for controlling the display brightness. The HAL interface is defined in the hw/display.h header file of the libdevice-node library, and the pkg-config device-node must be used to use the HAL interface.
The following code snippet shows the display HAL interface:
/*
Device ID
*/
#define DISPLAY_HARDWARE_DEVICE_ID "display"
/*
Device version
*/
#define DISPLAY_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,2)
struct display_device {
struct hw_common common;
/* Control display brightness */
int (*get_max_brightness)(int *brightness);
int (*get_brightness)(int *brightness);
int (*set_brightness)(int brightness);
};
The following table lists the display HAL functions.
Table: Display HAL functions
| Function prototype | Description | Mandatory |
|---|---|---|
int (*get_max_brightness)(int *brightness) |
Returns the maximum brightness value the display driver supports. | Yes |
int (*get_brightness)(int *brightness) |
Returns the current brightness value. | Yes |
int (*set_brightness)(int brightness) |
Sets the brightness value. | Yes |
The following code snippet shows an example of the display HAL:
#ifndef BACKLIGHT_PATH
#define BACKLIGHT_PATH "/sys/class/backlight/panel"
#endif
static int
display_get_max_brightness(int *val) {
static int max = -1;
char buf[BUF_MAX];
int fd;
if (max < 0) {
fd = open(BACKLIGHT_PATH"/max_brightness", O_RDONLY);
read(fd, buf, sizeof(buf));
close(fd);
max = atoi(buf);
}
*val = max;
return 0;
}
static int
display_get_brightness(int *brightness) {
int fd;
char buf[BUF_MAX];
fd = open(BACKLIGHT_PATH"/brightness", O_RDONLY);
read(fd, buf, sizeof(buf));
close(fd);
*brightness = atoi(buf);
return 0;
}
static int
display_set_brightness(int brightness) {
int max;
char buf[BUF_MAX];
display_get_max_brightness(&max);
if (brightness > max)
brightness = max;
snprintf(buf, sizeof(buf), "%d", brightness);
fd = open(BACKLIGHT_PATH"/brightness", O_WRONLY);
write(fd, buf, strlen(buf));
close(fd);
return 0;
}
static int
display_open(struct hw_info *info,
const char *id, struct hw_common **common) {
struct display_device *display_dev;
if (!info || !common)
return -EINVAL;
display_dev = calloc(1, sizeof(struct display_device));
if (!display_dev)
return -ENOMEM;
display_dev->common.info = info;
display_dev->get_max_brightness = display_get_max_brightness;
display_dev->get_brightness = display_get_brightness;
display_dev->set_brightness = display_set_brightness;
*common = (struct hw_common *)display_dev;
return 0;
}
static int
display_close(struct hw_common *common) {
if (!common)
return -EINVAL;
free(common);
return 0;
}
HARDWARE_MODULE_STRUCTURE = {
.magic = HARDWARE_INFO_TAG,
.hal_version = HARDWARE_INFO_VERSION,
.device_version = DISPLAY_HARDWARE_DEVICE_VERSION,
.id = DISPLAY_HARDWARE_DEVICE_ID,
.name = "Display",
.open = display_open,
.close = display_close,
};
External connector HAL
The external connector HAL provides functions for getting the external connector device status. The HAL interface is defined in the hw/external_connection.h header file of the libdevice-node library, and the pkg-config device-node needs to be used to use the HAL interface.
The following code snippet shows the interface of the external connector HAL:
/*
Device ID
*/
#define EXTERNAL_CONNECTION_HARDWARE_DEVICE_ID "external_connection"
#define EXTERNAL_CONNECTION_USB "USB"
#define EXTERNAL_CONNECTION_USB_HOST "USB-HOST"
#define EXTERNAL_CONNECTION_TA "TA"
#define EXTERNAL_CONNECTION_HDMI "HDMI"
#define EXTERNAL_CONNECTION_DOCK "Dock"
#define EXTERNAL_CONNECTION_MIC "Microphone"
#define EXTERNAL_CONNECTION_HEADPHONE "Headphone"
/*
Device version
*/
#define EXTERNAL_CONNECTION_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,1)
struct connection_info {
char *name;
char *state;
int flags;
};
typedef void (*ConnectionUpdated)(struct connection_info *info, void *data);
struct external_connection_device {
struct hw_common common;
/* Register external_connection event */
int (*register_changed_event)(ConnectionUpdated updated_cb, void *data);
void (*unregister_changed_event)(ConnectionUpdated updated_cb);
/* Get current states */
int (*get_current_state)(ConnectionUpdated updated_cb, void *data);
};
The following table lists the external connector HAL functions.
Table: External connector HAL functions
| Function prototype | Description | Mandatory |
|---|---|---|
int (*register_changed_event)(ConnectionUpdated updated_cb, void *data); |
Adds a callback function which is called when the external connector status changes. | Yes |
void (*unregister_changed_event)(ConnectionUpdated updated_cb); |
Removes the callback function added for the external connector status event. | Yes |
int (*get_current_state)(ConnectionUpdated updated_cb, void *data); |
Calls the function specified in the first parameter. The external connector information is delivered to the function parameter. | Yes |
The following code snippet shows an example of the external connector HAL:
#define SWITCH_ROOT_PATH "/sys/devices/virtual/switch"
static struct switch_device {
char *type;
char *name;
int state;
} switch_devices[] = {
{EXTERNAL_CONNECTION_USB, "usb_cable", 0},
{EXTERNAL_CONNECTION_DOCK, "dock", 0},
{EXTERNAL_CONNECTION_HEADPHONE, "earjack", 0},
};
static int
read_switch_state(char *path) {
char node[128], val[8];
FILE *fp;
snprintf(node, sizeof(node), "%s/%s/state", SWITCH_ROOT_PATH, path);
fp = fopen(node, "r");
fgets(val, sizeof(val), fp));
fclose(fp);
return atoi(val);
}
static int
external_connection_get_current_state(ConnectionUpdated updated_cb, void *data) {
int ret, i;
struct connection_info info;
char buf[8];
for (i = 0; i < ARRAY_SIZE(switch_devices); i++) {
ret = read_switch_state(switch_devices[i].name);
info.name = switch_devices[i].type;
snprintf(buf, sizeof(buf), "%d", ret);
info.state = buf;
updated_cb(&info, data);
}
return 0;
}
static int
read_switch_state(char *path) {
char node[128], val[8];
FILE *fp;
snprintf(node, sizeof(node), "%s/%s/state", SWITCH_ROOT_PATH, path);
fp = fopen(node, "r");
fgets(val, sizeof(val), fp));
fclose(fp);
return atoi(val);
}
static int
external_connection_close(struct hw_common *common) {
free(common);
return 0;
}
HARDWARE_MODULE_STRUCTURE = {
.magic = HARDWARE_INFO_TAG,
.hal_version = HARDWARE_INFO_VERSION,
.device_version = EXTERNAL_CONNECTION_HARDWARE_DEVICE_VERSION,
.id = EXTERNAL_CONNECTION_HARDWARE_DEVICE_ID,
.name = "external_connection",
.open = external_connection_open,
.close = external_connection_close,
};
LED HAL
The LED HAL provides functions for controlling LEDs. The HAL interface is defined in the hw/led.h header file of the libdevice-node library, and the pkg-config device-node must be used to use the HAL interface.
The following code snippet shows the interface of the LED HAL:
/*
Device ID
*/
#define LED_HARDWARE_DEVICE_ID "led"
/*
Device version
*/
#define LED_HARDWARE_DEVICE_VERSION MAKE_VERSION(1,0)
/*
LED device ID
*/
#define LED_ID_CAMERA_BACK "camera_back"
#define LED_ID_CAMERA_FRONT "camera_front"
#define LED_ID_NOTIFICATION "notification"
#define LED_ID_TOUCH_KEY "touch_key"
enum led_type {
LED_TYPE_MANUAL,
LED_TYPE_BLINK,
};
struct led_state {
/* LED type */
enum led_type type;
/*
The first byte means opaque and the other 3 bytes are RGB values.
You can use opaque byte as a led brightness value.
If the first byte is 0x00, led is switched off.
Anything else is worked as on. The max value is 0xFF.
*/
unsigned int color;
/* Turn on time in milliseconds */
int duty_on;
/* Turn off time in milliseconds */
int duty_off;
};
struct led_device {
struct hw_common common;
int (*set_state)(struct led_state *state);
};
The following table lists the LED HAL functions.
Table: LED HAL functions
| Function prototype | Description | Mandatory |
|---|---|---|
int (*set_state)(struct led_state *state); |
Sets the LED play style and plays LED lights. | Yes |
The following code snippet shows an example of the LED HAL:
#ifndef CAMERA_BACK_PATH
#define CAMERA_BACK_PATH "/sys/class/leds/torch-sec1"
#endif
static int
camera_back_set_state(struct led_state *state) {
static int max = -1;
int brt;
char buf[BUF_MAX];
int fd;
if (state->type == LED_TYPE_BLINK) {
printf("camera back led does not support LED_TYPE_BLINK mode");
return -ENOTSUP;
}
if (max < 0) {
fd = open(CAMERA_BACK_PATH"/max_brightness", O_RDONLY);
read(fd, buf, sizeof(buf));
close(fd);
max = atoi(buf);
}
brt = (state->color >> 24) & 0xFF;
brt = brt / 255.f * max;
snprintf(buf, sizeof(buf), "%d", brt);
fd = open(CAMERA_BACK_PATH"/brightness", O_WRONLY);
write(fd, buf, strlen(buf));
close(fd);
return 0;
}
struct led_device camera_back_dev = {
.set_state = camera_back_set_state,
};
struct led_device_list {
const char *id;
struct led_device *operations;
struct led_device *dev;
} led_list[] = {
{LED_ID_CAMERA_BACK, &camera_back_dev, NULL},
{LED_ID_CAMERA_FRONT, NULL, NULL},
{LED_ID_NOTIFICATION, NULL, NULL},
{LED_ID_TOUCH_KEY, NULL, NULL},
};
static int
led_open(struct hw_info *info, const char *id, struct hw_common **common) {
int i, list_len, id_len;
list_len = ARRAY_SIZE(led_list);
id_len = strlen(id) + 1;
for (i = 0; i < list_len; i++) {
if (strncmp(id, led_list[i].id, id_len))
continue;
if (!led_list[i].operations)
return -ENOTSUP;
if (led_list[i].dev)
goto out;
break;
}
if (i >= list_len)
return -EINVAL;
led_list[i].dev = calloc(1, sizeof(struct led_device));
led_list[i].dev->common.info = info;
led_list[i].dev->set_state
= led_list[i].operations->set_state;
out:
*common = (struct hw_common *)led_list[i].dev;
return 0;
}
static int
led_close(struct hw_common *common) {
free(common);
return 0;
}
HARDWARE_MODULE_STRUCTURE = {
.magic = HARDWARE_INFO_TAG,
.hal_version = HARDWARE_INFO_VERSION,
.device_version = LED_HARDWARE_DEVICE_VERSION,
.id = LED_HARDWARE_DEVICE_ID,
.name = "Default LED",
.open = led_open,
.close = led_close,
};
IR HAL
The IR HAL provides functions for controlling IR transmission. The HAL interface is defined in the hw/ir.h header file of the libdevice-node library, and the pkg-config device-node must be used to use the HAL interface.
The following code snippet shows the interface of the IR HAL:
/*
Device ID
*/
#define IR_HARDWARE_DEVICE_ID "ir"
/*
Device version
*/
#define IR_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,1)
struct ir_device {
struct hw_common common;
/* Control the IR state */
int (*is_available)(bool *available);
int (*transmit)(int *frequency_pattern, int size);
};
The following table lists the IR HAL functions.
Table: IR HAL functions
| Function prototype | Description | Mandatory |
|---|---|---|
int (*is_available)(bool *available); |
Returns whether the target device supports IR transmission. | Yes |
int (*transmit)(int *frequency_pattern, int size); |
Transmits IR with frequency pattern and its size. | Yes |
The following code snippet shows an example of the IR HAL:
#define IRLED_CONTROL_PATH "/sys/class/ir/ir_send"
static int
ir_is_available(bool *available) {
*available = true;
return 0;
}
static int
ir_transmit(int *frequency_pattern, int size) {
int i, ret;
for (i = 0; i < size; i++) {
snprintf(buf, sizeof(buf), "%d", frequency_pattern[i]);
fd = open(IRLED_CONTROL_PATH, O_WRONLY);
write(fd, buf, strlen(buf));
close(fd);
}
return 0;
}
static int
ir_open(struct hw_info *info, const char *id, struct hw_common **common) {
struct ir_device *ir_dev;
ir_dev = calloc(1, sizeof(struct ir_device));
ir_dev->common.info = info;
ir_dev->is_available = ir_is_available;
ir_dev->transmit = ir_transmit;
*common = (struct hw_common *)ir_dev;
return 0;
}
static int
ir_close(struct hw_common *common) {
free(common);
return 0;
}
HARDWARE_MODULE_STRUCTURE = {
.magic = HARDWARE_INFO_TAG,
.hal_version = HARDWARE_INFO_VERSION,
.device_version = IR_HARDWARE_DEVICE_VERSION,
.id = IR_HARDWARE_DEVICE_ID,
.name = "ir",
.open = ir_open,
.close = ir_close,
};
Touchscreen HAL
The touchscreen HAL provides functions for switching the touchscreen on and off. The HAL interface is defined in the hw/touchscreenf.h header file of the libdevice-node library, and the pkg-config device-node must be used to use the HAL interface.
The following code snippet shows the interface of the touchscreen HAL:
/*
Device ID
*/
#define TOUCHSCREEN_HARDWARE_DEVICE_ID "touchscreen"
/*
Device version
*/
#define TOUCHSCREEN_HARDWARE_DEVICE_VERSION MAKE_VERSION(0,1)
enum touchscreen_state {
TOUCHSCREEN_OFF, /* Disable touchscreen */
TOUCHSCREEN_ON, /* Enable touchscreen */
};
struct touchscreen_device {
struct hw_common common;
/* Control touchscreen state */
int (*get_state)(enum touchscreen_state *state);
int (*set_state)(enum touchscreen_state state);
};
The following table lists the touchscreen HAL functions.
Table: Touchscreen HAL functions
| Function prototype | Description | Mandatory |
|---|---|---|
int (*get_state)(enum touchscreen_state *state); |
Returns whether the touchscreen is enabled. | Yes |
int (*set_state)(enum touchscreen_state state); |
Enables and disables the touchscreen. | Yes |
The following code snippet shows an example of the touchscreen HAL:
#define TURNON_TOUCHSCREEN 1
#define TURNOFF_TOUCHSCREEN 0
#define TOUCHSCREEN_PATH "/sys/class/input/touchscreen/enable"
static int
touchscreen_get_state(enum touchscreen_state *state) {
int val;
int fd;
char buf[BUF_MAX];
fd = open(TOUCHSCREEN_PATH, O_RDONLY);
read(fd, buf, sizeof(buf));
close(fd);
val = atoi(buf);
switch (val) {
case TURNOFF_TOUCHSCREEN:
*state = TOUCHSCREEN_OFF;
break;
case TURNON_TOUCHSCREEN:
*state = TOUCHSCREEN_ON;
break;
default:
return -EINVAL;
}
return 0;
}
static int
touchscreen_set_state(enum touchscreen_state state) {
int val;
char buf[BUF_MAX];
switch (state) {
case TOUCHSCREEN_OFF:
val = TURNOFF_TOUCHSCREEN;
break;
case TOUCHSCREEN_ON:
val = TURNON_TOUCHSCREEN;
break;
default:
return -EINVAL;
}
snprintf(buf, sizeof(buf), "%d", val);
fd = open(TOUCHSCREEN_PATH, O_WRONLY);
write(fd, buf, strlen(buf));
close(fd);
return ret;
}
static int
touchscreen_open(struct hw_info *info, const char *id, struct hw_common **common) {
struct touchscreen_device *touchscreen_dev;
touchscreen_dev = calloc(1, sizeof(struct touchscreen_device));
touchscreen_dev->common.info = info;
touchscreen_dev->get_state = touchscreen_get_state;
touchscreen_dev->set_state = touchscreen_set_state;
*common = (struct hw_common *)touchscreen_dev;
return 0;
}
static int
touchscreen_close(struct hw_common *common) {
free(common);
return 0;
}
HARDWARE_MODULE_STRUCTURE = {
.magic = HARDWARE_INFO_TAG,
.hal_version = HARDWARE_INFO_VERSION,
.device_version = TOUCHSCREEN_HARDWARE_DEVICE_VERSION,
.id = TOUCHSCREEN_HARDWARE_DEVICE_ID,
.name = "touchscreen",
.open = touchscreen_open,
.close = touchscreen_close,
};
Sensor framework
Sensor devices are used widely in mobile devices to enhance the user experience. Most modern mobile operating systems have a framework which manages hardware and virtual sensors on the platform and provides convenient APIs to the application.
Sensors can be classified into hardware and virtual sensors. Tizen supports individual HALs for the following sensors:
- Hardware sensors
- Accelerometer
- Geomagnetic sensor
- Gyroscope
- Light sensor
- Proximity sensor
- Pressure sensor
- Ultraviolet sensor
- Temperature sensor
- Humidity sensor
- HRM (Heart Rate Monitor)
- HRM LED green sensor
- HRM LED IR sensor
- HRM LED red sensor
- Uncalibrated geomagnetic sensor
- Uncalibrated gyroscope sensor
- Human pedometer
- Human sleep monitor
- Human sleep detector
- Human stress monitor
- Virtual sensors
- Orientation sensor
- Gravity sensor
- Linear acceleration sensor
- Rotation vector sensor
- Gyroscope rotation vector sensor
- Geomagnetic rotation vector sensor
The sensor framework provides a sensor server for managing sensor HALs and a medium through which client applications are connected to the sensor handler to exchange data.
Figure: Sensor framework architecture
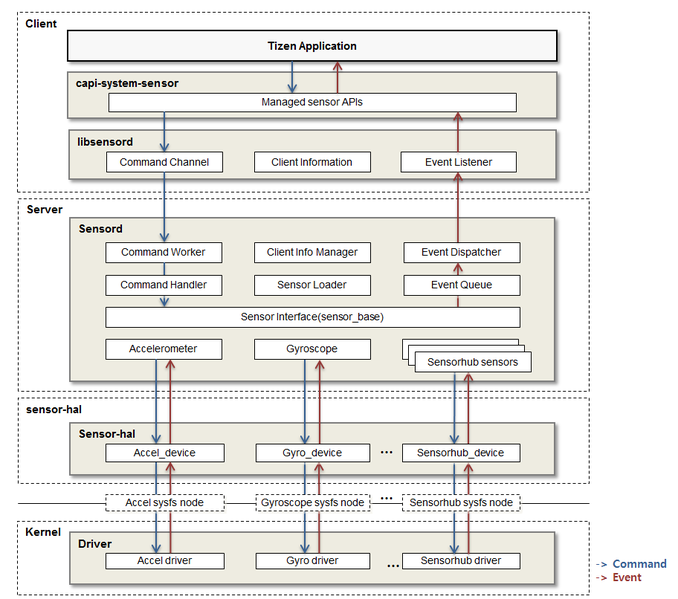
The sensor HALs retrieve data from sensor hardware and enable client applications to use the data for specific requirements.
The Sensor framework consists of the following components:
-
Sensor client library
Any application that wants to access the sensor server and communicate with it must use the sensor API library. Using the Sensor API, the application can control sensors and receive sensor events from the sensor server. By using the sensor API, any application or middleware framework can have the sensor client library executing within its own process context.
-
Sensor server
The sensor server is a daemon which communicates uniquely to multiple sensors (through drivers) in the system and dispatches sensor data or events back to the application. The sensor server is responsible for initializing the sensors during boot, driver configuration, sensor data fetching and delivery, and managing all sensors and clients on the platform.
-
Sensor HAL (Hardware Abstraction Layer)
The sensor HAL, which is interfaced to the sensor server, is responsible for interacting with the sensor drivers. The HAL processes data from the sensor drivers and communicates it to the server. Hardware sensors must support the HAL. The sensor HAL is implemented as a shared library. The
sensor_loaderfinds thehal.solibrary in the/usr/lib/sensor/directory, and loads it at boot time.
Porting the HAL interface
You can port individual sensors or a sensorhub.
Sensor
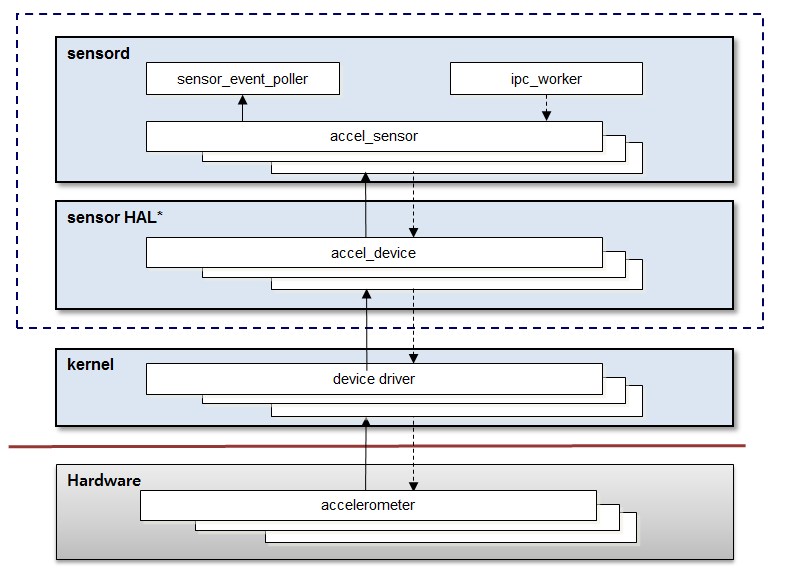
To port new hardware sensors, the HAL library-inherited sensor_device interface must be implemented. The HAL header files can be found at git:sensord/src/hal.
The Tizen HAL sensor types are also defined in the sensor_hal_types.h header file under the names SENSOR_DEVICE_....
Figure: Sensor HAL
The following code snippet shows the interface of the sensor HAL in the sensor_hal.h header file:
/*
Create devices
*/
typedef void *sensor_device_t;
typedef int (*create_t)(sensor_device_t **devices);
/*
Sensor device interface
1 device must be abstracted from 1 device event node
*/
class sensor_device {
public:
virtual ~sensor_device() {}
uint32_t get_hal_version(void) {
return SENSOR_HAL_VERSION(1, 0);
}
virtual int get_poll_fd(void) = 0;
virtual int get_sensors(const sensor_info_t **sensors) = 0;
virtual bool enable(uint32_t id) = 0;
virtual bool disable(uint32_t id) = 0;
virtual int read_fd(uint32_t **ids) = 0;
virtual int get_data(uint32_t id, sensor_data_t **data, int *length) = 0;
virtual bool set_interval(uint32_t id, unsigned long val) {
return true;
}
virtual bool set_batch_latency(uint32_t id, unsigned long val) {
return true;
}
virtual bool set_attribute_int(uint32_t id, int32_t attribute, int32_t value) {
return true;
}
virtual bool set_attribute_str(uint32_t id, int32_t attribute, char *value, int value_len) {
return true;
}
virtual bool flush(uint32_t id) {
return true;
}
};
The following table describes the functions of the sensor_device interface.
Table: sensor_device interface functions
| Prototype | Description | Return value |
|---|---|---|
uint32_t get_hal_version(void) |
Returns the HAL version. | Version |
int get_poll_fd(void) |
Returns the file description to poll events. | fd |
int get_sensors(const sensor_info_t **sensors) |
Returns the list of supported sensors. See the sensor_info_t in the sensor_hal_types.h header file. |
Size |
bool enable(uint32_t id) |
Enables the sensor. | true on success |
bool disable(uint32_t id) |
Disables the sensor. | true on success |
int read_fd(uint32_t **ids) |
Returns the sensor device IDs. The sensor framework calls this function when an event is detected from the poll-fd. |
Size |
int get_data(uint32_t id, sensor_data_t **data, int *length) |
Updates the sensor_data_t object (data) with details about the sensor, such as accuracy, timestamp, and values. Note that the sensor_data_t object must be created using the malloc() function. |
0 on success |
bool set_interval(uint32_t id, unsigned long val) |
Sets the interval. | true on success |
bool set_batch_latency(uint32_t id, unsigned long val) |
Sets the batch latency. | true on success |
bool set_attribute_int(uint32_t id, int32_t attribute, int32_t value) |
Sets the int value to the attribute. |
true on success |
bool set_attribute_str(uint32_t id, int32_t attribute, char *value, int value_len) |
Sets the string value to the attribute. |
true on success |
bool flush(uint32_t id) |
Flushes the sensor events. | true on success |
int (create_t *)(sensor_device_t **devices) |
Returns the sensor_device list. To create the sensor module in sensord, you must implement this interface. |
Size |
The following code snippet shows the interface of the sensor HAL types in the sensor_hal_type.h header file:
/*
Sensor Types
These types are used to control the sensors
- base unit
acceleration values : meter per second^2 (m/s^2)
magnetic values : micro-Tesla (uT)
orientation values : degrees
gyroscope values : degree/s
temperature values : degrees centigrade
proximity values : distance
light values : lux
pressure values : hectopascal (hPa)
humidity : relative humidity (%)
*/
typedef enum {
SENSOR_DEVICE_UNKNOWN = -2,
SENSOR_DEVICE_ALL = -1,
SENSOR_DEVICE_ACCELEROMETER,
SENSOR_DEVICE_GRAVITY,
SENSOR_DEVICE_LINEAR_
SENSOR_DEVICE_GEOMAGNETIC,
SENSOR_DEVICE_ROTATION_VECTOR,
SENSOR_DEVICE_ORIENTATION,
SENSOR_DEVICE_GYROSCOPE,
SENSOR_DEVICE_LIGHT,
SENSOR_DEVICE_PROXIMITY,
SENSOR_DEVICE_PRESSURE,
SENSOR_DEVICE_ULTRAVIOLET,
SENSOR_DEVICE_TEMPERATURE,
SENSOR_DEVICE_HUMIDITY,
SENSOR_DEVICE_HRM,
SENSOR_DEVICE_HRM_LED_GREEN,
SENSOR_DEVICE_HRM_LED_IR,
SENSOR_DEVICE_HRM_LED_RED,
SENSOR_DEVICE_GYROSCOPE_UNCAL,
SENSOR_DEVICE_GEOMAGNETIC_UNCAL,
SENSOR_DEVICE_GYROSCOPE_RV,
SENSOR_DEVICE_GEOMAGNETIC_RV,
SENSOR_DEVICE_HUMAN_PEDOMETER = 0x300,
SENSOR_DEVICE_HUMAN_SLEEP_MONITOR,
SENSOR_DEVICE_HUMAN_SLEEP_DETECTOR,
SENSOR_DEVICE_HUMAN_STRESS_MONITOR,
SENSOR_DEVICE_EXERCISE_WALKING = 0x400,
SENSOR_DEVICE_EXERCISE_RUNNING,
SENSOR_DEVICE_EXERCISE_HIKING,
SENSOR_DEVICE_EXERCISE_CYCLING,
SENSOR_DEVICE_EXERCISE_ELLIPTICAL,
SENSOR_DEVICE_EXERCISE_INDOOR_CYCLING,
SENSOR_DEVICE_EXERCISE_ROWING,
SENSOR_DEVICE_EXERCISE_STEPPER,
SENSOR_DEVICE_FUSION = 0x900,
SENSOR_DEVICE_AUTO_ROTATION,
SENSOR_DEVICE_AUTO_BRIGHTNESS,
SENSOR_DEVICE_GESTURE_MOVEMENT = 0x1200,
SENSOR_DEVICE_GESTURE_WRIST_UP,
SENSOR_DEVICE_GESTURE_WRIST_
SENSOR_DEVICE_GESTURE_MOVEMENT_STATE,
SENSOR_DEVICE_ACTIVITY_TRACKER = 0x1A00,
SENSOR_DEVICE_ACTIVITY_LEVEL_MONITOR,
} sensor_device_type;
The following code snippet shows the interface of the sensor HAL information in the sensor_hal_type.h header file:
/*
A platform sensor handler is generated based on this handle
This ID can be assigned by HAL developer, so it must be unique in 1 sensor_device.
*/
typedef struct sensor_info_t {
uint32_t
const char *name;
sensor_device_type type;
unsigned int event_type; /* for Internal API */
const char *model_name;
const char *vendor;
float min_range;
float max_range;
float resolution;
int min_interval;
int max_batch_count;
bool wakeup_supported;
} sensor_info_t;
enum sensor_accuracy_t {
SENSOR_ACCURACY_UNDEFINED = -1,
SENSOR_ACCURACY_BAD = 0,
SENSOR_ACCURACY_NORMAL = 1,
SENSOR_ACCURACY_GOOD = 2,
SENSOR_ACCURACY_VERYGOOD = 3
};
#define SENSOR_DATA_VALUE_SIZE 16
/* sensor_data_t */
typedef struct sensor_data_t {
int accuracy;
unsigned long long timestamp;
int value_count;
float values[SENSOR_DATA_VALUE_SIZE];
} sensor_data_t;
#define SENSOR_PEDOMETER_DATA_DIFFS_SIZE 20
typedef struct {
int accuracy;
unsigned long long timestamp;
int value_count; /* value_count == 8 */
float values[SENSOR_DATA_VALUE_SIZE];
/* values = {step count, walk step count, run step count,
moving distance, calorie burned, last speed,
last stepping frequency (steps per sec),
last step status (walking, running, ...)} */
/* Additional data attributes (not in sensor_data_t)*/
int diffs_count;
struct differences {
int timestamp;
int steps;
int walk_steps;
int run_steps;
int walk_up_steps;
int walk_down_steps;
int run_up_steps;
int run_down_steps;
float distance;
float calories;
float speed;
} diffs[SENSOR_PEDOMETER_DATA_DIFFS_SIZE];
} sensor_pedometer_data_t;
#define CONVERT_TYPE_ATTR(type, index) ((type) << 8 | 0x80 | (index))
enum sensor_attribute {
SENSOR_ATTR_ACTIVITY = CONVERT_TYPE_ATTR(SENSOR_DEVICE_ACTIVITY_TRACKER, 0x1),
};
enum sensor_activity {
SENSOR_ACTIVITY_UNKNOWN = 1,
SENSOR_ACTIVITY_STILL = 2,
SENSOR_ACTIVITY_WALKING = 4,
SENSOR_ACTIVITY_RUNNING = 8,
SENSOR_ACTIVITY_IN_VEHICLE = 16,
SENSOR_ACTIVITY_ON_BICYCLE = 32,
};
The following code snippet shows an example of the sensor_device implementation for the accelerometer (sensor-hal-tm1/src/):
/* In create.cpp */
#include <sensor/sensor_hal.h>
#include <sensor_log.h>
#include <vector>
#include "accel/accel_device.h"
static std::vector<sensor_device_t> devs;
template<typename _sensor>
void
create_sensor(const char *name) {
sensor_device *instance = NULL;
try {
instance = new _sensor;
} catch (std::exception &e) {
ERR("Failed to create %s sensor device, exception: %s", name, e.what());
return;
} catch (int err) {
_ERRNO(err, _E, "Failed to create %s sensor device", name);
return;
}
devs.push_back(instance);
}
extern "C" int create(sensor_device_t **devices) {
#ifdef ENABLE_ACCEL
create_sensor<accel_device>("Accelerometer");
#endif
*devices = &devs[0];
return devs.size();
}
/* In accel_device.h */
#ifndef _ACCEL_DEVICE_H_
#define _ACCEL_DEVICE_H_
#include <sensor/sensor_hal.h>
#include <string>
#include <vector>
#include <functional>
class accel_device : public sensor_device {
public:
accel_device();
virtual ~accel_device();
int get_poll_fd(void);
int get_sensors(const sensor_info_t **sensors);
bool enable(uint32_t id);
bool disable(uint32_t id);
bool set_interval(uint32_t id, unsigned long val);
int read_fd(uint32_t **ids);
int get_data(uint32_t id, sensor_data_t **data, int *length);
private:
int m_node_handle;
int m_x;
int m_y;
int m_z;
unsigned long m_polling_interval;
unsigned long long m_fired_time;
bool m_sensorhub_controlled;
int m_method;
std::string m_data_node;
std::string m_enable_node;
std::string m_interval_node;
std::function<bool (void)> update_value;
std::vector<uint32_t> event_ids;
bool update_value_input_event(void);
bool update_value_iio(void);
void raw_to_base(sensor_data_t *data);
};
#endif /* _ACCEL_DEVICE_H_ */
/* In accel_device.cpp */
#include <fcntl.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <linux/input.h>
#include <sys/ioctl.h>
#include <poll.h>
#include <util.h>
#include <sensor_common.h>
#include <sensor_log.h>
#include "accel_device.h"
#define MODEL_NAME "K2HH"
#define VENDOR "ST Microelectronics"
#define RESOLUTION 16
#define RAW_DATA_UNIT 0.122
#define MIN_INTERVAL 1
#define MAX_BATCH_COUNT 0
#define SENSOR_NAME "SENSOR_ACCELEROMETER"
#define SENSOR_TYPE_ACCEL "ACCEL"
#define INPUT_NAME "accelerometer_sensor"
#define ACCEL_SENSORHUB_POLL_NODE_NAME "accel_poll_delay"
#define GRAVITY 9.80665
#define G_TO_MG 1000
#define RAW_DATA_TO_G_UNIT(X) (((float)(X))/((float)G_TO_MG))
#define RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(X) (GRAVITY * (RAW_DATA_TO_G_UNIT(X)))
#define MIN_RANGE(RES) (-((1 << (RES))/2))
#define MAX_RANGE(RES) (((1 << (RES))/2)-1)
static sensor_info_t sensor_info = {
id: 0x1,
name: SENSOR_NAME,
type: SENSOR_DEVICE_ACCELEROMETER,
event_type: (SENSOR_DEVICE_ACCELEROMETER << SENSOR_EVENT_SHIFT) | RAW_DATA_EVENT,
model_name: MODEL_NAME,
vendor: VENDOR,
min_range: MIN_RANGE(RESOLUTION) * RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(RAW_DATA_UNIT),
max_range: MAX_RANGE(RESOLUTION) * RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(RAW_DATA_UNIT),
resolution: RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(RAW_DATA_UNIT),
min_interval: MIN_INTERVAL,
max_batch_count: MAX_BATCH_COUNT,
wakeup_supported: false
};
accel_device::accel_device()
: m_node_handle(-1)
, m_x(-1)
, m_y(-1)
, m_z(-1)
, m_polling_interval(1000)
, m_fired_time(0)
, m_sensorhub_controlled(false) {
const std::string sensorhub_interval_node_name = ACCEL_SENSORHUB_POLL_NODE_NAME;
node_info_query query;
node_info info;
query.sensorhub_controlled = m_sensorhub_controlled = util::is_sensorhub_controlled(sensorhub_interval_node_name);
query.sensor_type = SENSOR_TYPE_ACCEL;
query.key = INPUT_NAME;
query.iio_enable_node_name = "accel_enable";
query.sensorhub_interval_node_name = sensorhub_interval_node_name;
if (!util::get_node_info(query, info)) {
_E("Failed to get node info");
throw ENXIO;
}
util::show_node_info(info);
m_method = info.method;
m_data_node = info.data_node_path;
m_enable_node = info.enable_node_path;
m_interval_node = info.interval_node_path;
m_node_handle = open(m_data_node.c_str(), O_RDONLY);
if (m_node_handle < 0) {
_ERRNO(errno, _E, "accel handle open fail for accel processor");
throw ENXIO;
}
if (m_method == INPUT_EVENT_METHOD) {
if (!util::set_monotonic_clock(m_node_handle))
throw ENXIO;
update_value = [=]() {
return this->update_value_input_event();
};
} else {
if (!info.buffer_length_node_path.empty())
util::set_node_value(info.buffer_length_node_path, 480);
if (!info.buffer_enable_node_path.empty())
util::set_node_value(info.buffer_enable_node_path, 1);
update_value = [=]() {
return this->update_value_iio();
};
}
_I("accel_device is created!");
}
accel_device::~accel_device() {
close(m_node_handle);
m_node_handle = -1;
_I("accel_device is destroyed!");
}
int
accel_device::get_poll_fd(void) {
return m_node_handle;
}
int
accel_device::get_sensors(const sensor_info_t **sensors) {
*sensors = &sensor_info;
return 1;
}
bool
accel_device::enable(uint32_t id) {
util::set_enable_node(m_enable_node, m_sensorhub_controlled, true, SENSORHUB_ACCELEROMETER_ENABLE_BIT);
set_interval(id, m_polling_interval);
m_fired_time = 0;
_I("Enable accelerometer sensor");
return true;
}
bool
accel_device::disable(uint32_t id) {
util::set_enable_node(m_enable_node, m_sensorhub_controlled, false, SENSORHUB_ACCELEROMETER_ENABLE_BIT);
_I("Disable accelerometer sensor");
return true;
}
bool
accel_device::set_interval(uint32_t id, unsigned long val) {
unsigned long long polling_interval_ns;
polling_interval_ns = ((unsigned long long)(val) * 1000llu * 1000llu);
if (!util::set_node_value(m_interval_node, polling_interval_ns)) {
_E("Failed to set polling resource: %s", m_interval_node.c_str());
return false;
}
_I("Interval is changed from %dms to %dms", m_polling_interval, val);
m_polling_interval = val;
return true;
}
bool
accel_device::update_value_input_event(void) {
int accel_raw[3] = {0,};
bool x,y,z;
int read_input_cnt = 0;
const int INPUT_MAX_BEFORE_SYN = 10;
unsigned long long fired_time = 0;
bool syn = false;
x = y = z = false;
struct input_event accel_input;
_D("accel event detection!");
while ((syn == false) && (read_input_cnt < INPUT_MAX_BEFORE_SYN)) {
int len = read(m_node_handle, &accel_input, sizeof(accel_input));
if (len != sizeof(accel_input)) {
_E("accel_file read fail, read_len = %d",len);
return false;
}
++read_input_cnt;
if (accel_input.type == EV_REL) {
switch (accel_input.code) {
case REL_X:
accel_raw[0] = (int)accel_input.value;
x = true;
break;
case REL_Y:
accel_raw[1] = (int)accel_input.value;
y = true;
break;
case REL_Z:
accel_raw[2] = (int)accel_input.value;
z = true;
break;
default:
_E("accel_input event[type = %d, code = %d] is unknown.", accel_input.type, accel_input.code);
return false;
break;
}
} else if (accel_input.type == EV_SYN) {
syn = true;
fired_time = util::get_timestamp(&accel_input.time);
} else {
_E("accel_input event[type = %d, code = %d] is unknown.", accel_input.type, accel_input.code);
return false;
}
}
if (syn == false) {
_E("EV_SYN didn't come until %d inputs had come", read_input_cnt);
return false;
}
if (x)
m_x = accel_raw[0];
if (y)
m_y = accel_raw[1];
if (z)
m_z = accel_raw[2];
m_fired_time = fired_time;
_D("m_x = %d, m_y = %d, m_z = %d, time = %lluus", m_x, m_y, m_z, m_fired_time);
return true;
}
bool
accel_device::update_value_iio(void) {
struct {
int16_t x;
int16_t y;
int16_t z;
int64_t timestamp;
} __attribute__((packed)) data;
struct pollfd pfd;
pfd.fd = m_node_handle;
pfd.events = POLLIN | POLLERR;
pfd.revents = 0;
int ret = poll(&pfd, 1, -1);
if (ret == -1) {
_ERRNO(errno, _E, "Failed to poll from m_node_handle:%d", m_node_handle);
return false;
} else if (!ret) {
_E("poll timeout m_node_handle:%d", m_node_handle);
return false;
}
if (pfd.revents & POLLERR) {
_E("poll exception occurred! m_node_handle:%d", m_node_handle);
return false;
}
if (!(pfd.revents & POLLIN)) {
_E("poll nothing to read! m_node_handle:%d, pfd.revents = %d", m_node_handle, pfd.revents);
return false;
}
int len = read(m_node_handle, &data, sizeof(data));
if (len != sizeof(data)) {
_E("Failed to read data, m_node_handle:%d read_len:%d", m_node_handle, len);
return false;
}
m_x = data.x;
m_y = data.y;
m_z = data.z;
m_fired_time = data.timestamp;
_D("m_x = %d, m_y = %d, m_z = %d, time = %lluus", m_x, m_y, m_z, m_fired_time);
return true;
}
int
accel_device::read_fd(uint32_t **ids) {
if (!update_value()) {
_D("Failed to update value");
return false;
}
event_ids.clear();
event_ids.push_back(sensor_info.id);
*ids = &event_ids[0];
return event_ids.size();
}
int
accel_device::get_data(uint32_t id, sensor_data_t **data, int *length) {
sensor_data_t *sensor_data;
/* [Important] In HAL, you MUST allocate memory for data.
* HAL does not need to release this memory because it must be released only after sending this data to clients.
*/
sensor_data = (sensor_data_t *)malloc(sizeof(sensor_data_t));
retvm_if(!sensor_data, -ENOMEM, "Memory allocation failed");
sensor_data->accuracy = SENSOR_ACCURACY_GOOD;
sensor_data->timestamp = m_fired_time;
sensor_data->value_count = 3;
sensor_data->values[0] = m_x;
sensor_data->values[1] = m_y;
sensor_data->values[2] = m_z;
raw_to_base(sensor_data);
*data = sensor_data;
*length = sizeof(sensor_data_t);
return 0;
}
void
accel_device::raw_to_base(sensor_data_t *data) {
data->values[0] = RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(data->values[0] * RAW_DATA_UNIT);
data->values[1] = RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(data->values[1] * RAW_DATA_UNIT);
data->values[2] = RAW_DATA_TO_METRE_PER_SECOND_SQUARED_UNIT(data->values[2] * RAW_DATA_UNIT);
}
Sensorhub
The sensorhub HAL supports multiple sensors logically from 1 physical device file. If many sensors are supported by a single device file, the sensorhub HAL can be configured so that it can operate each sensor as a logically-separate device.
The sensor HAL interface is provided to manufacturers and vendors through the sensor_hal.h and sensor_hal_types.h header files. It uses just 1 thread for polling sensor events from multiple device files.
Figure: Sensorhub HAL
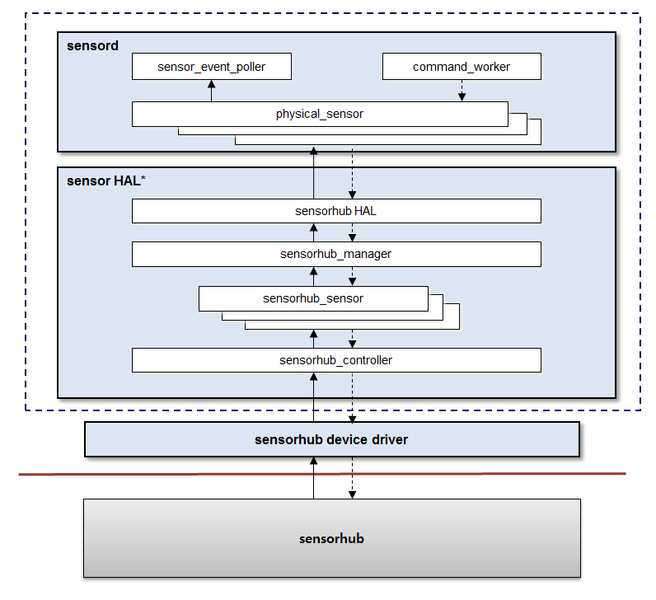
The sensorhub HAL can be developed by using the sensor_device interface. An example of a sensorhub HAL can be found in the sensor-hal-tm1/src/sensorhub Git.
IDs can be assigned by the vendor or manufacturer for the sensorhub sensors by using the following sensor_info_t interface:
typedef struct sensor_info_t {
uint32_t id;
const char *name;
sensor_device_type type;
unsigned int event_type; /* For Internal API */
const char *model_name;
const char *vendor;
float min_range;
float max_range;
float resolution;
int min_interval;
int max_batch_count;
bool wakeup_supported;
} sensor_info_t;
The following code snippet shows an example of a sensorhub HAL implementation:
#include <algorithm>
#include <sensor_log.h>
#include "sensorhub.h"
#include "sensorhub_controller.h"
#include "sensorhub_manager.h"
#include "system_state.h"
sensorhub_device::sensorhub_device() {
controller = &sensorhub_controller::get_instance();
if (!controller) {
ERR("Failed to allocated memory");
throw;
}
manager = &sensorhub_manager::get_instance();
if (!manager) {
ERR("Failed to allocated memory");
throw;
}
manager->set_controller(controller);
system_state_handler::get_instance().set_controller(controller);
INFO("sensorhub_device is created!");
}
sensorhub_device::~sensorhub_device() {
INFO("sensorhub_device is destroyed!");
}
int
sensorhub_device::get_poll_fd(void) {
return controller->get_poll_fd();
}
int
sensorhub_device::get_sensors(const sensor_info_t **sensors) {
int size;
size = manager->get_sensors(sensors);
return size;
}
bool
sensorhub_device::enable(uint32_t id) {
system_state_handler::get_instance().initialize();
controller->enable();
sensorhub_sensor *sensor = manager->get_sensor(id);
if (!sensor) {
ERR("Failed to enable sensor(0x%x)", id);
return false;
}
return sensor->enable();
}
bool
sensorhub_device::disable(uint32_t id) {
system_state_handler::get_instance().finalize();
controller->disable();
sensorhub_sensor *sensor = manager->get_sensor(id);
if (!sensor) {
ERR("Failed to disable sensor(0x%x)", id);
return false;
}
return sensor->disable();
}
bool
sensorhub_device::set_interval(uint32_t id, unsigned long val) {
sensorhub_sensor *sensor = manager->get_sensor(id);
if (!sensor) {
ERR("Failed to set interval to sensor(0x%x)", id);
return false;
}
return sensor->set_interval(val);
}
bool
sensorhub_device::set_batch_latency(uint32_t id, unsigned long val) {
sensorhub_sensor *sensor = manager->get_sensor(id);
if (!sensor) {
ERR("Failed to set batch latency to sensor(0x%x)", id);
return false;
}
return sensor->set_batch_latency(val);
}
bool
sensorhub_device::set_attribute_int(uint32_t id, int32_t attribute, int32_t value) {
int ret;
sensorhub_sensor *sensor = manager->get_sensor(id);
if (!sensor) {
ERR("Failed to set attribute to sensor(0x%x)", id);
return false;
}
ret = sensor->set_attribute_int(attribute, value);
if ((ret < 0) && (ret != -EBUSY)) {
ERR("Failed to send sensorhub data");
return false;
}
if (ret == -EBUSY) {
WARN("Command is sent during sensorhub firmware update");
return false;
}
return true;
}
bool
sensorhub_device::set_attribute_str(uint32_t id, int32_t attribute, char *value, int value_len) {
int ret;
sensorhub_sensor *sensor = manager->get_sensor(id);
if (!sensor) {
ERR("Failed to set attribute to sensor(0x%x)", id);
return false;
}
ret = sensor->set_attribute_str(attribute, value, value_len);
if ((ret < 0) && (ret != -EBUSY)) {
ERR("Failed to send sensorhub data");
return false;
}
if (ret == -EBUSY) {
WARN("Command is sent during sensorhub firmware update");
return false;
}
return true;
}
int
sensorhub_device::read_fd(uint32_t **ids) {
sensorhub_data_t data;
/* Step 1 */
if (!controller->read_fd(data))
return 0;
/* Step 2 */
const char *hub_data = data.values;
int data_len = data.value_count;
/* Step 3 */
event_ids.clear();
while (data_len > 0) {
DBG("Remaining data length: %d", data_len);
int parsed = parse(hub_data, data_len);
if (parsed < 0) {
ERR("Parsing failed");
break;
}
data_len -= parsed;
hub_data += parsed;
}
/* Step 4 */
int size = event_ids.size();
if (event_ids.empty())
return 0;
*ids = &event_ids[0];
return size;
}
int
sensorhub_device::get_data(uint32_t id, sensor_data_t **data, int *length) {
int remains = 1;
sensorhub_sensor *sensor = manager->get_sensor(id);
if (!sensor) {
ERR("Failed to get data from sensor(0x%x)", id);
return -1;
}
remains = sensor->get_data(data, length);
return remains;
}
bool
sensorhub_device::flush(uint32_t id) {
return false;
}
int
sensorhub_device::parse(const char *hub_data, int data_len) {
return parse_data(hub_data, data_len);
}
int
sensorhub_device::parse_data(const char *hub_data, int data_len) {
const char *cursor = hub_data;
int32_t libtype = 0;
sensorhub_sensor *sensor = manager->get_sensor(libtype);
if (!sensor) {
ERR("Unknown Sensorhub lib type: %d", libtype);
return -1;
}
event_ids.push_back(sensor->get_id());
return sensor->parse(cursor, data_len);
}
int
sensorhub_device::parse_debug(const char *hub_data, int data_len) {
return 0;
}
#include <unistd.h>
#include <string.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <dirent.h>
#include <linux/input.h>
#include <sys/ioctl.h>
#include <fstream>
#include <sensor_log.h>
#include <util.h>
#include "sensorhub_controller.h"
sensorhub_controller::sensorhub_controller()
: m_enabled(false)
, m_poll_node(-1)
, m_data_node(-1) {}
sensorhub_controller::~sensorhub_controller() {}
sensorhub_controller& sensorhub_controller::get_instance(void) {
static sensorhub_controller instance;
return instance;
}
int
sensorhub_controller::get_poll_fd(void) {
/* Returns the sensorhub fd */
return -1;
}
bool
sensorhub_controller::enable(void) {
m_enabled = true;
INFO("Enable Sensorhub");
return true;
}
bool
sensorhub_controller::disable(void) {
m_enabled = false;
INFO("Disable Sensorhub");
return true;
}
int
sensorhub_controller::open_input_node(const char* input_node) {
/* Implements the specific sensorhub logic */
return -1;
}
bool
sensorhub_controller::read_fd(sensorhub_data_t &data) {
/* Implements the specific sensorhub logic */
return false;
}
int
sensorhub_controller::read_sensorhub_data(void) {
/* Implements the specific sensorhub logic */
return -1;
}
int
sensorhub_controller::read_large_sensorhub_data(void) {
/* Implements the specific sensorhub logic */
return -1;
}
int
sensorhub_controller::send_sensorhub_data(const char *data, int data_len) {
/* Implements the specific sensorhub logic */
return -1;
}
int
sensorhub_controller::print_sensorhub_data(const char* name, const char *data, int length) {
/* Implements the specific sensorhub logic */
return 0;
}
References
The reference kernel configuration for sensors varies depending on vendor types. However, there is a standard kernel subsystem for sensors: the Industrial I/O (IIO) subsystem. IIO is intended to provide support for devices that are, in some sense, analog to digital or digital to analog. For more information, see https://wiki.analog.com/software/linux/docs/iio/iio.
The following table lists some example kernel configurations.
Table: Example kernel configurations
| Sensor component | Kernel configuration | Device nodes |
|---|---|---|
| Accelerometer | CONFIG_INPUT_KR3DH |
/dev/input/event0/, /dev/input/event1/, /dev/input/event2/, /dev/input/event3/, /dev/input/event4/, /dev/input/event5/ |
| Proximity | CONFIG_INPUT_GP2A |
|
| Light sensor | CONFIG_INPUT_GP2A |
|
| Electronic compass | CONFIG_SENSORS_AK8975 |
Project Git repositories
The following table lists the available project Git repositories.
Table: Git repositories
| Project | Repository | Description |
|---|---|---|
capi-system-sensor |
platform/core/api/sensor |
Tizen sensor C-API |
sensord |
platform/core/system/sensord |
Sensor daemon and libraries for managing sensors and clients |
sensor-hal-tm1 |
platform/adaptation/tm1/sensor-hal-tm1 |
Sensor HAL for the TM1 device |
sensor-hal-tm2 |
platform/adaptation/tm2/sensor-hal-tm2 |
Sensor HAL for the TM2 device |
sensor-hal-tw1 |
platform/adaptation/tw1/sensor-hal-tw1 |
Sensor HAL for the TW1 device |
sensor-hal-emulator |
platform/adaptation/emulator/sensor-hal-emulator |
Sensor HAL for the emulator |
Testing and verifying sensors
The sensor-test package, in the sensord Git repository, provides sensorctl, a command-line tool for testing sensors. After installing sensor-test package, you can test sensors using the following commands:
$ sensorctl test accelerometer
$ sensorctl test gyroscope
$ sensorctl test accelerometer 100 /* enable accelerometer with interval 100 ms */
$ sensorctl test accelerometer 100 1000 /* enable accelerometer with interval 100 ms and 1s batch latency */
$ sensorctl test accelerometer 100 1000 0 /* enable accelerometer with interval 100 ms, 1s batch latency and always on option */
$ sensorctl info accelerometer /* retrieve accelerometer sensor information */
Crash framework
crash-manager
crash-manager is a tool used to create crash reports when an application gets crashed.
crash-manager is not usually invoked manually, but automatically by the kernel when the crash occurs. crash-manager generates the crash report and attaches the kernel-provided core, if requested. crash-worker package provides the 99-crash-manager.conf file, which configures kernel parameters for crash-manager to get invoked automatically on crash. For more information, see 99-crash-manager.conf.
crash-manager consists of the following options:
| Option | Description |
|---|---|
| -p --pid=PID | Specifies the process ID (PID) of the dumped process. |
| -u --uid=UID | Specifies the real user identifier (UID) of the dumped process. |
| -g --gid=GID | Specifies the real group identifier (GID) of the dumped process. |
| -i --tid=TID | Specifies the thread identifier (TID) of the thread that triggered core dump. For more information, see core(5). |
| -s --signal=SIG | Specifies the signal number causing dump. |
| -t --time=TIME | Specifies the time of dump in seconds since the epoch. |
| -l --live | Gets the core dump of the running process. |
| -k --kill-after-dump | Kills after dump (only with --live option). |
| -r --print | Prints the report path to standard output (stdout). |
| -h --help | Prints the help message. |
In addition to handling crashes, crash-manager can create reports from running processes, livedumps. Livedumps contain core generated from the running process. The core is not created automatically but need to be requested explicitly by you. crash-manager needs to be invoked with the --live option, to produce the livedump report:
$ /usr/bin/crash-manager -p <PID> --live --print
99-crash-manager.conf
The 99-crash-manager.conf file consists of the following kernel configurations related to the core dump:
-
kernel.core_pattern
This value contains the path to the file in which the kernel will store the core dump in case of a process crash. The possible values are described in core(5). If the first character of this path is a pipe symbol (|), then the whole line is interpreted as a program that can be executed, and the core dump will be given as a standard input. To disable crash-manager, set this value to an empty string.Default value:
"/usr/bin/crash-manager -p %p -u %u -g %g -s %s -t %t" -
kernel.core_pipe_limit
Defines the maximum number of concurrent processes that may be dumped at the same time. For more information, see core(5). If the limit is exceeded, then the next crashed process will not be dumped.Default value:
10 -
fs.suid_dumpable
Defines whether the core dump is produced for the set-owner-user-ID (SUID) binaries (proc(5)) or not.Default value:
2
crash-manager.conf
The default configuration file for crash-manager is /etc/crash-manager.conf. It is used to configure the location, the content and retention policy of crash reports.
-
SystemMaxUse
Determines the maximum size (in kilobytes) on disk that reports can occupy. If this value is exceeded, then the oldest reports will be deleted. Value0turns off the check.Default value:
0 -
SystemKeepFree
If set to a value other than0, then crash-manager will check whether an appropriate amount of empty space (in kilobytes) is available on the disk or not. Value0turns off the check.Default value:
0 -
MaxRetentionSec
Defines the maximal time (in seconds) a report will be kept. Older reports will be deleted. Value0turns off the check.Default value:
0 -
MaxCrashDump
Defines how many reports will be kept. In case the number of reports exceeds this value, the oldest reports will be removed. Value0turns off the check.Default value:
0 -
AllowZip
Determines whether the report will be compressed or not.Default value:
yes -
CoreDump
If set to0, then the core dump will be removed from the final report.Default value:
1 -
CrashRootPath
Specifies the directory in which the crash reports will be saved. In the specified path, crash-manager will create four sub-directories:dump/: For saved reports of crashed applicationslivedump/: For saved reports of running processes (with option--live)log/: For logstemp/: For files while creating report
Default value:
/opt/usr/share/crash/ -
ReportType
Specifies the type of the crash report. Possible values are:INFO: Only the*.infofile will be saved. The*.infofile contains information about the registers and the call stack of the crashed application.FULL: The full crash report:*.info: Contains information about the registers and the call stack of the crashed application.*.coredump: A process memory dump.*.so_info: Contains information about shared libraries used by the crashed application, together with the names of packages that contain them.*.log: Contains information provided by dump_systemstate.- Interesting files (
cmdline,environ,io,maps,smaps,stack,stat,statm,cwd,fd) from the/proc/<PID>/directory.
Default value:
FULL -
ExtraScript
Path to a script or an application that will be executed during report creation. The process will be started asynchronously.Default value is empty
Disabling crash-manager
In some situations there may be a need to disable the crash-manager functionality. In such cases, the recommended solution is to provide the sysctl configuration file to overwrite the default kernel.core_pattern setting. For example, the 99-disable-crash-manager.conf file must be placed in the /usr/lib/sysctl.d/ directory and must contain:
kernel.core_pattern=
kernel.core_uses_pid=0
D-Bus notification
After the report is generated, crash-manager sends the D-Bus signal containing the following information about the crashed process:
Signature: sssssiia{sv}
Member: ProcessCrashed
Interface: org.tizen.system.crash.Crash
Path: /Org/Tizen/System/Crash/Crash
Data structure:
| Data | Type |
|---|---|
| command name | STRING |
| command path | STRING |
| appid | STRING |
| pkgid | STRING |
| report path | STRING |
| PID | INT32 |
| TID | INT32 |
| array | ARRAY |
Array containing pairs of keys (STRING) and values (VARIANT). Possible keys:
| Key | Type | Description |
|---|---|---|
| x86.eip | UINT32 | instruction pointer |
| x86_64.rip | UINT64 | instruction pointer |
| arm.pc | UINT32 | instruction pointer |
| arm.lr | UINT32 | instruction pointer |
| aarch64.pc | UINT64 | instruction pointer |
| aarch64.lr | UINT64 | instruction pointer |
| sys.signal | INT32 | signal that caused crash |
| sys.tid.comm | STRING | thread name |
Depending on the architecture, the array will contain:
| Arch | PC (instruction pointer) | Link Register |
|---|---|---|
| x86 | x86.eip | (not available) |
| x86_64 | x86_64.eip | (not available) |
| arm | arm.pc | arm.lr |
| aarch64 | aarch64.pc | aarch64.lr |
minicoredumper
minicoredumper is a tool that accepts a core dump on a standard input and saves the modified (size-reduced) core dump in a file. This tool is internally used by crash-manager to generate minicoredump. Modifications depend on the configuration, and they mainly rely on minimization of the core dump file.
Usually, integrator does not need to modify this configuration unless integrator needs to change parameters of minicoredump files or settings for specified applications.
minicoredumper can be used alone by setting /proc/sys/kernel/core_pattern to |/usr/bin/minicoredumper %P %u %g %s %t %h %e. All possible % specifiers are described in core(5).
The default path of the configuration file is /etc/minicoredumper/minicoredumper.cfg.json and the file format is JSON. Possible options are:
-
base_dir (string): Defines the root directory where the dumped data will be stored. This option is overwritten by the command line option, which is set by crash-manager.
-
watch (array): A set of recepts, which will be used for applications that meet the defined criteria:
- exe (string): The full path to the binary returned by readlink. The
*character is supported as wildcard. If not specified, the*value will be used. - comm (string): The basename of the command that was run. The
*character is supported as wildcard. If not specified, the*value will be used. - recept (string): The full path to the recept file.
Note
If exe and comm are specified, then both conditions must be met to use the recept.
- exe (string): The full path to the binary returned by readlink. The
Default minicoredumper.cfg.json:
{
"base_dir": "/usr/local/var/crash/minicoredumper",
"watch": [
{
"exe": "/usr/bin/dotnet-launcher",
"recept": "dotnet.recept.json"
},
{
"recept": "generic.recept.json"
}
]
}
The default path of the recept files is /etc/minicoredumper/ and the format is JSON. Possible options are:
- stacks (list): Contains settings for what should be dumped.
- dump_stacks (bool): If true, stacks will be dumped.
- first_thread_only (bool): If true, only the first thread will be dumped.
- max_stack_size (integer): Maximum size of the stack.
- maps (list): Contains list “dump_by_name”.
- dump_by_name (list): List of pathnames of memory regions that should be dumped (pathnames are read from
/proc/<PID>/maps).
- dump_by_name (list): List of pathnames of memory regions that should be dumped (pathnames are read from
- compression (list): Contains settings related to report compression.
- compressor (string): Command line of compressor that supports stdin as input and stdout as output (gzip, bzip2, xz).
- extension (string): In case of a compressed core file, the specified value will be appended at the end of the core file name; otherwise,
.compressedwill be appended to the compressed core files. - in_tar (bool): Determines whether the core file should be a
.tarfile or not. This is useful because the tar format enables preserving the sparse properties of the core file. - dump_auxv_so_list (bool): If true, the shared object list will be saved in the core file.
- dump_pthread_list (bool): If true, the pthread list will be saved in the core file.
- dump_robust_mutex_list (bool): If true then robust mutexes will be saved in the core file.
- dump_scope (int): Only registered dumps at this value or lower than this value will be dumped. This option applies only to libminicoredumper.
- dump_build_id (bool): If true, then for all the contained ELF files, minicoredumper will save ELF header with BuildID to enable determining a specific version of the shared libraries.
- live_dumper (bool): If true, then minicoredumper will trigger applications registered by libminicoredumper.
- write_proc_info (boolean): If true, then interesting files (
cmdline,environ,io,maps,smaps,stack,stat,statm,cwd,fd) from/proc/<PID>will be copied to the dump directory. - proc_info_exclude (list): Contains a list of filenames that must not be copied from the
/proc/directory. For example, copying thesmapsfiles will significantly increase the dumping time. - write_debug_log (bool): If true, then minicoredumper messages will be saved to
debug.txtin the dump directory. - dump_fat_core (bool): If true, then all virtual memory areas will be saved in the separate core dump file. This must be used only for debug purpose.
- dump_pointed_by_regs (bool): If true, then memory region around the address to which the CPU registers point is saved in the core file by minicoredumper. Precisely, for each CPU register minicoredumper saves page to which address points, one page before the address, and one page after the address. Page is 4096 bytes on most architectures.
- full_coredump (bool): If true, then minicoredumper dumps the full core dump file.
Default generic.recept.json:
{
"stacks": {
"dump_stacks": true,
"first_thread_only": false,
"max_stack_size": 0
},
"maps": {
"dump_by_name": [
"[vdso]"
]
},
"compression": {
"compressor": "",
"extension": "",
"in_tar": true
},
"dump_auxv_so_list": true,
"dump_pthread_list": true,
"dump_robust_mutex_list": true,
"dump_scope": 1024,
"dump_build_id": true,
"live_dumper": true,
"write_proc_info": true,
"proc_info_exclude": [
"smaps"
],
"write_debug_log": false,
"dump_fat_core": false,
"dump_pointed_by_regs": true
}
dump_systemstate
dump_systemstate is used to dump information that can be useful for developers to fix bugs in the crashed applications.
Default dump contains:
- Basic information:
- Binary version from
/etc/info.ini - Tizen version from
/etc/tizen-release - Kernel version from
/proc/version - Boot arguments from
/proc/cmdline - CPU and system architecture from
/proc/cpuinfo - System uptime from
/proc/uptime - Local time from
/opt/etc/localtime
- Binary version from
- Resource usage information:
- System statistics from
/proc/stat - System memory usage from
/proc/meminfo - System disk I/O statistics from
/proc/diskstats - System disk space usage
- System memory statistics
- System statistics from
- Process information:
- Process information by
pscommand
- Process information by
- Device information:
- Device major numbers from
/proc/devices
- Device major numbers from
The dump contents of dump_systemstate can be modified by the following command line options:
| Option | Description |
|---|---|
| -f | write to file (instead of stdout) |
| -k | dump kernel messages (root only) |
| -d | dump dlog messages |
| -j | dump journal log messages |
| -p | dump list of installed packages |
| -e | dump extras defined in the config |
Depending on the command line options, dump_systemstate can save the output of these commands:
/bin/df -h/bin/du -ah /opt --exclude=/opt/usr/bin/ls -al /opt/etc/localtime/bin/top -bcH -n 1/bin/ps auxfw/bin/memps -v/bin/buxton2ctl dump memory/bin/buxton2ctl dump system/usr/bin/pkgcmd -l/bin/dmesg -T/bin/dlogutil -d -v threadtime -u 16384/bin/journalctl -b -n 1024
There are two types of configuration files, under files/ subdirectory and programs/ subdirectory. These files allow to specify the results of additional files and programs that will be included in the dump_systemstate output:
-
files/subdirectory: Specified files will be appended to the dump_systemstate output.- [SECTION_NAME]
- title: Title that will be printed before contents of the file
- path: Path to the file
Example:
[UNIQUE_ID_KEY] title=header line that gets printed (path gets appended too) path=/path/to/the/file [DLOG_CONF] title=dlog configuration file path=/opt/etc/dlog.conf -
programs/subdirectory: Specified commands will be executed and the output will be added to the dump_systemstate output.- [SECTION_NAME]
- title: Title that will be printed before contents of the file
- path: Path to the application
- args: Arguments for the application
- env: Environment variable, which should be passed to the application
Example:
[UNIQUE_ID_KEY] title=header line describing the program (will be printed alongside env, path and args) path=/path/to/the/program/executable args=-x foo --verbose env=POSIXLY_CORRECT=1 [DLOG_DUMP] title=dump dlog contents path=/usr/bin/dlogutil args=-d
livedumper
livedumper is a tool to save the core dump of the live process.
Usage:
livedumper [-m] [-P <fd>] [-f <file_name>] <PID>
| Option | Description |
|---|---|
| -f <file_name> | Saves core dump to the specified file (default livecore.<PID> in current directory). |
| -P <fd> | Descriptor for the registers structure (used by crash-manager). |
| -m | Saves minicore. Saves minimum information that allows to restore the call stack. |
Example:
$ sleep 123 &
$ livedumper -f sleep.core -m $?
Stability monitor
The purpose of the stability monitor is to keep track of the usage of system resources with low overhead. The resources that are tracked for maximum and average usage are as follows:
- CPU
- Memory
- Input/Output
- Open file descriptors (only maximum value is measured, not average).
Resources are consumed by various processes and are classified according to their type: application or service. Applications have the type as native, web app, and .NET, with the state as foreground and background. The process parameters are distinguished in configuration and various parameters can be assigned to different services and applications. When excessive use of resources abnormality is detected, an appropriate D-Bus signal is sent, and an optional abnormality report is generated.
Kernel module
The stability monitor relies on the kernel module, which collects information about processes state in the system in the most resource-efficient way. This raw data is exposed using the /proc/tsm interface.
The following resource statistics are collected:
- CPU: system time and user time [cpu_usage = d(system_time + user_time) / dt].
- Memory: RSS.
- I/O: bytes read and bytes written.
- FDs: number of open file descriptors.
Service
The purpose of stability monitor service is to:
- Periodically monitor process state based on the raw data provided by the kernel module.
- Gather additional process specific data from running system, for example, app type and state from
AULandpkgmgr. - Read and apply provided configuration to the system, apply configuration defined limits.
- Generate D-Bus signal and abnormality report, if configured.
Configuration
The configuration uses a hierarchical layout which consists of a set of JSON files. The primary file is /usr/lib/stability-monitor/default.conf. Additional files can be placed in /etc/stability-monitor.d, and the files are read in alphabetical order, for example, Z.conf overrides A.conf. Configuration files are merged together and not replaced.
In the resulting JSON object, the top-level entries have keys corresponding to programs, for example:
resourcedorg.tizen.calendar
Program name must be application ID for applications and executable name for other system processes.
If a program does not have specific configuration, the appropriate class-wide configuration is used. The available classes are:
-
global
Global section for all processes. -
foreground_native_app
Native applications running in foreground. -
background_native_app
Native applications running in background. -
foreground_web_app
Web applications running in foreground. -
background_web_app
Web applications running in background. -
foreground_csharp_app
.NET applications running in foreground. -
background_csharp_app
.NET applications running in background. -
foreground_ui_widget
Widget applications running in foreground. -
background_ui_widget
Widget applications running in background. -
native_service
Service applications. -
other_service
Other system processes.
The global is the rule-set used as a fallback when neither the process-specific nor the relevant class-wide configuration exists. In addition to the rules described as follows, this rule-set must specify the sampling_rate value which describes how often to read the process data from the kernel.
Each rule-set specifies a set of parameters applicable to the given process or group. The rule-sets are as follows:
-
monitor
Defines whether to monitor a process.Default value:
1 -
print_current
Defines whether to print current process resource usage in real-time.Default value:
0 -
apply_to_children
Defines whether process rule-set should be applied to all of its children.Default value:
0 -
kill
Defines whether to kill the process after detecting abnormality.Default value:
0 -
report
Defines whether to create bug report after detecting abnormality.Default value:
0 -
sampling_rate
Specifies the sampling rate (Hz). This is the process data update frequency. Maximum allowed value is specified bysampling_ratefrom theglobalsection.Default value:
1 -
cpu_limit_peak
Specifies the maximum allowed CPU usage. A value of1.0means that the process can consume the CPU time equivalent to using one core at 100%.Default value:
4 -
mem_limit_peak
Specifies the maximum allowed memory usage. A value of1.0means that the process can use all available memory. It is the system-wide parameter, and there is no way to specify it in Megabytes.Default value:
1 -
io_limit_peak
Specifies the maximum I/O usage in Megabytes per second (MB/s). The I/O usage is unlike the usage of CPU and memory values.Default value:
100 -
fd_limit
Specifies the limit of open file descriptors.Default value:
1000 -
cpu_limit_avg
Specifies the limit for an average CPU usage over period of time specified bycpu_avg_period. The meaning is the same as forcpu_limit_peak.Default value:
4 -
mem_limit_avg
Specifies the limit for an average memory usage over period of time specified bymem_avg_period. The meaning is the same as formem_limit_peak.Default value:
1 -
io_limit_avg
Specifies the limit for an average I/O usage over period of time specified byio_avg_period. The meaning is the same as forio_limit_peak.Default value:
100 -
cpu_avg_period
Specifies the period of time to calculate the average CPU usage, measured in seconds.Default value:
10 -
mem_avg_period
Specifies the period of time to calculate the average memory usage, measured in seconds.Default value:
10 -
io_avg_period
Specifies the period of time to calculate the average I/O usage, measured in seconds.Default value:
10 -
cpu_reporting_period
Minimum period of time in seconds between reporting the subsequent abnormalities for the same process.Default value:
20 -
mem_reporting_period
Minimum period of time in seconds between reporting the subsequent abnormalities for the same process.Default value:
20 -
io_reporting_period
Minimum period of time in seconds between reporting the subsequent abnormalities for the same process.Default value:
20 -
fd_reporting_period
Minimum period of time in seconds between reporting the subsequent abnormalities for the same process.Default value:
-1
The following is the example configuration:
{
"global":{
"monitor": 1,
"print_current": 0,
"kill": 0,
"report": 0,
"sampling_rate": 1,
"cpu_limit_avg": 4,
"cpu_avg_period": 10,
"cpu_limit_peak": 4,
"cpu_reporting_period": 20,
"mem_limit_avg": 1,
"mem_avg_period": 10,
"mem_limit_peak": 1,
"mem_reporting_period": 20,
"io_limit_avg": 100.0,
"io_avg_period": 10,
"io_limit_peak": 100.0,
"io_reporting_period": 20,
"fd_limit": 1000,
"fd_reporting_period": -1,
},
"foreground_native_app":{
"cpu_limit_avg": 0.6,
},
"background_native_app":{
"cpu_limit_avg": 0.5,
},
"other_service":{
"cpu_limit_avg": 0.7,
},
"test-stability":{
"monitor": 1,
"cpu_limit_avg": 0.7,
"cpu_limit_peak": 0.9,
"mem_limit_peak": 0.3,
},
"sleep":{
"monitor": 0,
},
"stability-monitor":{
"monitor": 0,
"print_current": 0,
"cpu_limit_avg": 0.02,
"cpu_avg_period": 10,
},
"crash-manager":{
"monitor": 0,
"apply_to_children": 1,
},
"9zWvGSYU8Z.calendar": {
"print_current": 1,
}
}
D-Bus signal
When the abnormality is detected, the stability monitor sends one of the following D-Bus signals, depending on the module or parameter that detects or causes the abnormality:
-
CPU
Signature:
isdda{sv}
Member:AbnormalityDetected
Interface:org.tizen.abnormality.cpu.relative
Path:/Org/Tizen/StabilityMonitor/tsm_cpu
Data structure:Data Type Description pid INT32 Process ID. limitType STRING Either peakoravg.cpuRelative DOUBLE Actual value that caused the abnormality. maxAllowedCpuRelative DOUBLE Allowed value. array ARRAY Additional parameters. -
Memory
Signature:
isdda{sv}
Member:AbnormalityDetected
Interface:org.tizen.abnormality.mem.relative
Path:/Org/Tizen/StabilityMonitor/tsm_mem
Data structure:Data Type Description pid INT32 Process ID. limitType STRING Either peakoravg.memRelative DOUBLE Actual value that caused the abnormality. maxAllowedMemRelative DOUBLE Allowed value. array ARRAY Additional parameters. -
I/O
Signature:
isdda{sv}
Member:AbnormalityDetected
Interface:org.tizen.abnormality.io.absolute
Path:/Org/Tizen/StabilityMonitor/tsm_io
Data structure:Data Type Description pid INT32 Process ID. limitType STRING Either peakoravg.IOAbsolute DOUBLE Actual value that caused the abnormality. maxAllowedIOAbsolute DOUBLE Allowed value. array ARRAY Additional parameters. -
File descriptors
Signature:
isdda{sv}
Member:AbnormalityDetected
Interface:org.tizen.abnormality.fd.absolute
Path:/Org/Tizen/StabilityMonitor/tsm_fd
Data structure:Data Type Description pid INT32 Process ID. limitType STRING Always peak.FDsAbsolute DOUBLE Actual value that caused the abnormality. maxAllowedFDsAbsolute DOUBLE Allowed value. array ARRAY Additional parameters.
The array of additional parameters is the same for all modules and contains pairs of keys (STRING) and values (VARIANT):
| Key | Type | Description |
|---|---|---|
| report_path | STRING | Path to the bug report. |
| killed | BOOL | True if process has been killed, False otherwise. |
| process_name | STRING | Either application ID for applications or executable name for others. |
| process_state | STRING | Either foreground or background. |
The following is an example signal observed with dbus-monitor:
signal time=1547866746.490843 sender=:1.73054 -> destination=(null destination) serial=3 path=/Org/Tizen/StabilityMonitor/tsm_cpu; interface=org.tizen.abnormality.cpu.relative; member=AbnormalityDetected
int32 27124
string "peak"
double 0.962084
double 0.95
array [
dict entry(
string "report_path"
variant string "/opt/usr/share/crash/dump/top_27124_20190118215903.zip"
)
dict entry(
string "killed"
variant boolean false
)
dict entry(
string "process_name"
variant string "top"
)
dict entry(
string "process_state"
variant string "background"
)
]