Pose Detection
Pose Detection is a new feature of Media Vision Inference API since Tizen 6.0. This feature provides landmark detection. Besides, it defines landmarks and parts of a human body to help detect a human pose with a Motion Capture (MoCap) file, which you can create or edit using various tools.
Background
In Tizen, human body pose landmarks and body parts are defined as follows:
Figure: Definition of human body pose landmarks and body parts
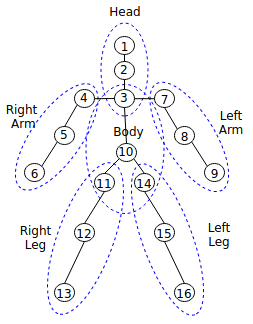
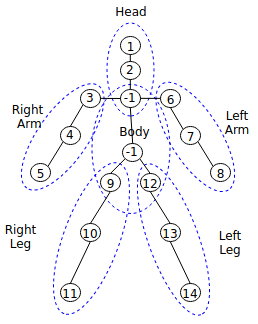
The pose landmark detection models are available in Open Model Zoo, such as hosted model zoo or on a public GitHub site, such as public pose model. The public pose models provide landmark information, such as the number of landmarks and locations. To use them correctly, you must map the information to landmarks based on the definition. For example, you can use the public pose model, which provides 14 landmarks as follows:
 ,
,
In this model, -1 denotes that there are no landmarks. Using this landmark information, you can create a mapping file. Suppose you create a mapping file with the name pose_mapping.txt, then you can populate the pose_mapping.txt file as follows:
1
2
-1
3
4
5
6
7
8
-1
9
10
11
12
13
14
1 denotes that the first landmark of the model corresponds to the first definition, MV_INFERENCE_HUMAN_POSE_HEAD. -1 at the third position denotes that there is no corresponding landmark MV_INFERENCE_HUMAN_POSE_THORAX. 3 at the fourth position denotes that the third landmark of the model corresponds to the fourth, MV_INFERENCE_HUMAN_POSE_RIGHT_SHOULDER. The following table shows how the public model works:
Table: Example of how public pose model maps to the definitions
| Value | Definition | pose_mapping.txt |
|---|---|---|
| 1 | MV_INFERENCE_HUMAN_POSE_HEAD | 1 |
| 2 | MV_INFERENCE_HUMAN_POSE_NECK | 2 |
| 3 | MV_INFERENCE_HUMAN_POSE_THORAX | -1 |
| 4 | MV_INFERENCE_HUMAN_POSE_RIGHT_SHOULDER | 3 |
| 5 | MV_INFERENCE_HUMAN_POSE_RIGHT_ELBOW | 4 |
| 6 | MV_INFERENCE_HUMAN_POSE_RIGHT_WRIST | 5 |
| 7 | MV_INFERENCE_HUMAN_POSE_LEFT_SHOULDER | 6 |
| 8 | MV_INFERENCE_HUMAN_POSE_LEFT_ELBOW | 7 |
| 9 | MV_INFERENCE_HUMAN_POSE_LEFT_WRIST | 8 |
| 10 | MV_INFERENCE_HUMAN_POSE_PELVIS | -1 |
| 11 | MV_INFERENCE_HUMAN_POSE_RIGHT_HIP | 9 |
| 12 | MV_INFERENCE_HUMAN_POSE_RIGHT_KNEE | 10 |
| 13 | MV_INFERENCE_HUMAN_POSE_RIGHT_ANKLE | 11 |
| 14 | MV_INFERENCE_HUMAN_POSE_LEFT_HIP | 12 |
| 15 | MV_INFERENCE_HUMAN_POSE_LEFT_KNEE | 13 |
| 16 | MV_INFERENCE_HUMAN_POSE_LEFT_ANKLE | 14 |
The MoCap file includes the movements of objects or a person. There are various MoCap formats, but a well-known BioVision Hierarchy (BVH) file is supported in media vision. BVH file has a hierarchy structure to provide landmark information with landmarks’ names, and the structure can be changed. It means that landmark information is different from the definition. To use the BVH file correctly, you have to map the information to the landmarks based on the definitions. For example, the BVH file describes a squat pose as follows:
The example starts with the hips and ends with the left foot with 15 landmarks. You can create a mapping file named mocap_mapping.txt as follows:
Hips,10
Neck,2
Head,1
LeftUpArm,7
LeftLowArm,8
LeftHand,9
RightUpArm,4
RightLowArm,5
RightHand,6
LeftUpLeg,14
LeftLowLeg,15
LeftFoot,16
RightUpLeg,11
RightLowLeg,12
RightFoot,13
If there is no mapped landmark, you don’t need to list it. For example, index three is missing. It means that, in this BVH file, the third definition, MV_INFERENCE_HUMAN_POSE_THORAX is not defined and not used.
Prerequisites
To enable your application to use the media vision inference functionality, follow these steps:
-
To use the functions and data types of the Media Vision Inference API (in mobile and wearable applications), include the
<mv_inference.h>header file in your application.In addition, you must include the
<image_util.h>header file to handle the image decoding tasks, or the<camera.h>header file to provide the preview images:#include <mv_inference.h> /* Image decoding for image recognition */ #include <image_util.h> /* Preview images for image tracking */ #include <camera.h> -
Create a structure to store global data.
For pose detection, use the following
imagedata_sstructure:struct _imagedata_s { mv_source_h g_source; mv_engine_config_h g_engine_config; mv_inference_h g_inference; mv_pose_h g_pose; }; typedef struct _imagedata_s imagedata_s; static imagedata_s imagedata;
Detect human pose
To detect human pose from an image, follow the steps below:
-
Create the source and engine configuration handles:
int error_code = 0; error_code = mv_create_source(&imagedata.g_source); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = mv_create_engine_config(&imagedata.g_engine_config); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code= %d", error_code); -
Decode the image file and fill the
g_sourcehandle with the decoded raw data. In the following example imagesample.jpg, a person is shown in a squat pose, and the image is in the<OwnDataPath>folder:
The
<OwnDataPath>refers to your own data path:/* For details, see the Image Util API Reference */ unsigned char *dataBuffer = NULL; size_t bufferSize = 0; unsigned int width = 0; unsigned int height = 0; image_util_decode_h imageDecoder = NULL; image_util_image_h decodedImage = NULL; error_code = image_util_decode_create(&imageDecoder); if (error_code != IMAGE_UTIL_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = image_util_decode_set_input_path(imageDecoder, "<OwnDataPath>/sample.jpg"); if (error_code != IMAGE_UTIL_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = image_util_decode_set_colorspace(imageDecoder, IMAGE_UTIL_COLORSPACE_RGB888); if (error_code != IMAGE_UTIL_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = image_util_decode_run2(imageDecoder, &decodedImage); if (error_code != IMAGE_UTIL_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = image_util_get_image(decodedImage, &width, &height, NULL, &dataBuffer, &bufferSize); if (error_code != IMAGE_UTIL_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = image_util_decode_destroy(imageDecoder); if (error_code != IMAGE_UTIL_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); /* Fill the dataBuffer to g_source */ error_code = mv_source_fill_by_buffer(imagedata.g_source, dataBuffer, (unsigned int)bufferSize, width, height, MEDIA_VISION_COLORSPACE_RGB888); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = image_util_destroy_image(decodedImage); if (error_code != IMAGE_UTIL_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); decodedImage = NULL; -
To detect landmark of the pose from the
sample.jpgimage, create ag_inferencemedia vision inference handle:error_code = mv_inference_create(&imagedata.g_inference); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); -
Configure
g_engine_configwith a body pose model data and its mapping file. Suppose that model datadata.tfliteand its mapping filedata_mapping.txt, which are described in the background section, are applied and the files are stored in<OwnDataPath>. In addition, the model meta filemeta.jsonwhich includes the model information, is stored in<OwnDataPath>. In the following example, all error check codes are omitted for simplicity:#define MODEL_DATA "<OwnDataPath>/data.tflite" #define MODEL_META "<OwnDataPath>/meta.json" #define MODEL_MAPPING_FILE "<OwnDataPath>/data_mapping.txt" char *inputNodeName = "image"; char *outputNodeName[] = { "output" }; error_code = mv_create_engine_config(&imagedata.g_engine_config); error_code = mv_engine_config_set_string_attribute(imagedata.g_engine_config, MV_INFERENCE_MODEL_WEIGHT_FILE_PATH, MODEL_DATA); error_code = mv_engine_config_set_string_attribute(imagedata.g_engine_config, MV_INFERENCE_MODEL_USER_FILE_PATH, MODEL_MAPPING_FILE); error_code = mv_engine_config_set_string_attribute(handle, MV_INFERENCE_MODEL_META_FILE_PATH, MODEL_META); error_code = mv_engine_config_set_int_attribute(imagedata.g_engine_config, MV_INFERENCE_BACKEND_TYPE, MV_INFERENCE_BACKEND_TFLITE); error_code = mv_engine_config_set_int_attribute(imagedata.g_engine_config, MV_INFERENCE_BACKEND_TYPE, MV_INFERENCE_TARGET_CPU);For more information on the configuration attributes, such as
MV_INFERENCE_MODEL_WEIGHT_FILE_PATH, see Media Vision Inference API (in mobile and wearable applications). For more information about model meta files, see meta file template. -
Use
mv_inference_configure()to configureg_inferenceinference handle withg_engine_config:error_code = mv_inference_configure(imagedata.g_inference, imagedata.g_engine_config); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); -
Use
mv_inference_prepare()to prepare inference:error_code = mv_inference_prepare(imagedata.g_inference); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); -
To detect pose, create
g_posemedia vision pose handle:error_code = mv_pose_create(&imagedata.g_pose); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); -
Suppose that the MoCap BVH file
mocap.bvhand its mapping filemocap_mapping.txt, that are described in the Background section, are applied and the files are stored in<OwnDataPath>. Then, set the files tog_posehandle for comparing and detecting the pose:#define MOCAP_DATA "<OwnDataPath>/mocap.bvh" #define MOCAP_MAPPING_FILE "<OwnDataPath>/mocap_mapping.txt" error_code = mv_pose_set_from_file(imagedata.g_pose, MOCAP_DATA, MOCAP_MAPPING_FILE); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); -
Use
mv_inference_pose_landmark_detect()to detect landmarks from the image:error_code = mv_inference_pose_landmark_detect(imagedata.g_source, &imagedata.g_inference, NULL, _on_pose_landmark_detected_cb, NULL); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code);The
mv_inference_pose_landmark_detect()invokes the_on_pose_landmark_detected_cb()callback. The following callback example shows how to detect pose from the detected landmark:static void _on_pose_landmark_detected_cb(mv_source_h source, mv_inference_pose_result_h pose, void *user_data) { float pose_score = 0.0f; error_code = mv_pose_compare(imagedata.g_pose, pose, (MV_INFERENCE_HUMAN_BODY_PART_LEG_LEFT | MV_INFERENCE_HUMAN_BODY_PART_LEG_RIGHT), &pose_score); if (error_code != MEDIA_VISION_ERROR_NONE) { dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); return; } if (pose_score > 0.9f) { dlog_print(DLOG_INFO, LOG_TAG, "success to detect pose with score %.3f\n", pose_score); } else { dlog_print(DLOG_INFO, LOG_TAG, "fail to detect pose with score %.3f\n", pose_score); } } -
After the detection is complete, destroy the source, engine configuration, the inference, and the pose handles using
mv_destroy_source(),mv_destroy_engine_config(),mv_inference_destroy(), andmv_pose_destroy():error_code = mv_destroy_source(imagedata.g_source); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = mv_destroy_engine_config(imagedata.g_engine_config); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = mv_inference_destroy(imagedata.g_inference); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code); error_code = mv_pose_destroy(imagedata.g_pose); if (error_code != MEDIA_VISION_ERROR_NONE) dlog_print(DLOG_ERROR, LOG_TAG, "error code = %d", error_code);
Related information
- Dependencies
- Tizen 6.0 and Higher for Mobile
- Tizen 6.0 and Higher for Wearable