Proximity Sensor Usage
The proximity sensor can measure the distance of an object from the front of the device. Some sensors only report the maximum measurement (far) or 0 (near), and they are called wake-up sensors. Before attempting to measure the distance values, you need to know whether the device supports the proximity sensor.
Determining Whether the Sensor Is Supported
To determine whether the proximity sensor is supported on the device:
-
Create a new project in Tizen Studio with the Basic UI template, and specify the project name as SensorProximity.
For more information on how to create a project, see Creating a Project (in mobile and wearable applications).
-
In the new project, open the
sensorproximity.csource file in thesrcfolder and add the required library header file and variables:- The
sensor.hfile is a header file for various sensor libraries. - The purpose of the application is to display whether the proximity sensor is supported, and the current distance value. As a result, a variable is defined for both of these values.
#include "sensorproximity.h" #include <sensor.h> struct appdata { Evas_Object *win; Evas_Object *conform; Evas_Object *label0; /* Whether the proximity sensor is supported */ Evas_Object *label1; /* Distance value */ }; typedef struct appdata appdata_s; - The
-
Create 2 new functions on top of the
create_base_gui()function:-
The
show_is_supported()function identifies whether the proximity sensor is supported, and displays the result in the first label component.The
sensor_is_supported()function requests the support information. PassingSENSOR_PROXIMITYas the first parameter makes the second parameter return the proximity support information. -
The
my_box_pack()function adds a UI component to a box container.
static void show_is_supported(appdata_s *ad) { char buf[PATH_MAX]; bool is_supported = false; sensor_is_supported(SENSOR_PROXIMITY, &is_supported); sprintf(buf, "Proximity Sensor is %s", is_supported ? "support" : "not support"); elm_object_text_set(ad->label0, buf); } static void my_box_pack(Evas_Object *box, Evas_Object *child, double h_weight, double v_weight, double h_align, double v_align) { /* Tell the child packed into the box to be able to expand */ evas_object_size_hint_weight_set(child, h_weight, v_weight); /* Fill the expanded area (above) as opposed to centering in it */ evas_object_size_hint_align_set(child, h_align, v_align); /* Set the child as the box content and show it */ evas_object_show(child); elm_object_content_set(box, child); /* Put the child into the box */ elm_box_pack_end(box, child); /* Show the box */ evas_object_show(box); } -
-
To create the box, add the 2 labels to the box, and call the
show_is_supported()function to determine the sensor support, you must modify the source code at the bottom of thecreate_base_gui()function as follows:/* Conformant */ /* Create and initialize elm_conformant elm_conformant is mandatory for the base GUI to have a proper size when the indicator or virtual keypad is visible */ ad->conform = elm_conformant_add(ad->win); elm_win_indicator_mode_set(ad->win, ELM_WIN_INDICATOR_SHOW); elm_win_indicator_opacity_set(ad->win, ELM_WIN_INDICATOR_OPAQUE); evas_object_size_hint_weight_set(ad->conform, EVAS_HINT_EXPAND, EVAS_HINT_EXPAND); elm_win_resize_object_add(ad->win, ad->conform); evas_object_show(ad->conform); /* Box can contain other elements in a vertical line (by default) */ Evas_Object *box = elm_box_add(ad->win); evas_object_size_hint_weight_set(box, EVAS_HINT_EXPAND, EVAS_HINT_EXPAND); evas_object_size_hint_align_set(box, EVAS_HINT_EXPAND, EVAS_HINT_EXPAND); elm_object_content_set(ad->conform, box); evas_object_show(box); /* First label (for the sensor support) */ ad->label0 = elm_label_add(ad->conform); elm_object_text_set(ad->label0, "Msg -"); my_box_pack(box, ad->label0, 1.0, 0.0, -1.0, -1.0); /* Second label (for the current distance value) */ ad->label1 = elm_label_add(ad->conform); elm_object_text_set(ad->label1, "Value -"); my_box_pack(box, ad->label1, 1.0, 1.0, -1.0, -1.0); /* Show the window after the base GUI is set up */ evas_object_show(ad->win); /* Check the sensor support */ show_is_supported(ad); -
Build (in mobile and wearable applications) and run (in mobile and wearable applications) the application. If the proximity sensor is supported, the Proximity Sensor is support message is shown on the device screen.
Not all smartphones support this sensor. In that case, test the application on the emulator.

Requesting Sensor Events
To implement a feature that requests the corresponding event as the proximity sensor detects an object, and displays the distance value on the screen:
-
Add a structure for the sensor and a global variable to the top of the
sensorproximity.csource file:- The
sensorinfo_sstructure includes a sensor handle and an event listener variable. - The
sensor_infois a global variable of thesensorinfo_sstructure.
struct appdata { Evas_Object *win; Evas_Object *conform; Evas_Object *label0; Evas_Object *label1; }; typedef struct appdata appdata_s; struct _sensor_info { sensor_h sensor; /* Sensor handle */ sensor_listener_h sensor_listener; /* Sensor listener */ }; typedef struct _sensor_info sensorinfo_s; static sensorinfo_s sensor_info; - The
-
To request sensor events, you need a sensor handle and an event listener, and must start the listener. Create 2 new functions above the
create_base_gui()function:-
The
_new_sensor_value()function is an event callback for the proximity sensor, and it outputs a new sensor value to the screen.The sensor data is passed to the second parameter. The distance data is saved in
values[0]. -
The
start_proximity_sensor()function starts the proximity sensor and specifies the event callback function:- The
sensor_get_default_sensor()function gets a specific sensor handle. PassingSENSOR_PROXIMITYto the first parameter returns an proximity sensor handle to the second parameter. - The
sensor_create_listener()function creates an event listener. Passing a sensor handle to the first parameter returns a listener object to the second parameter. - The
sensor_listener_set_events_cb()function specifies a callback function to the listener. The parameters follow this order: event listener, callback function name, and user data. - The
sensor_listener_start()function starts the listener.
- The
static void _new_sensor_value(sensor_h sensor, sensor_event_s events[], int events_count, void *user_data) { if (events[0].value_count < 1) return; char buf[PATH_MAX]; appdata_s *ad = (appdata_s*)user_data; sprintf(buf, "Distance: %0.1f", events[0].values[0]); elm_object_text_set(ad->label1, buf); } static void start_proximity_sensor(appdata_s *ad) { sensor_error_e err = SENSOR_ERROR_NONE; sensor_get_default_sensor(SENSOR_PROXIMITY, &sensor_info.sensor); err = sensor_create_listener(sensor_info.sensor, &sensor_info.sensor_listener); sensor_listener_set_interval(sensor_info.sensor_listener, 100); sensor_listener_set_events_cb(sensor_info.sensor_listener, _new_sensor_value, ad); sensor_listener_start(sensor_info.sensor_listener); } -
-
To operate the event listener automatically when the application starts running, invoke the above
start_proximity_sensor()function at the end of thecreate_base_gui()function:/* Show the window after the base GUI is set up */ evas_object_show(ad->win); show_is_supported(ad); start_proximity_sensor(ad); -
Run the application again. To test it on your smartphone, simply bring the device close to your face.
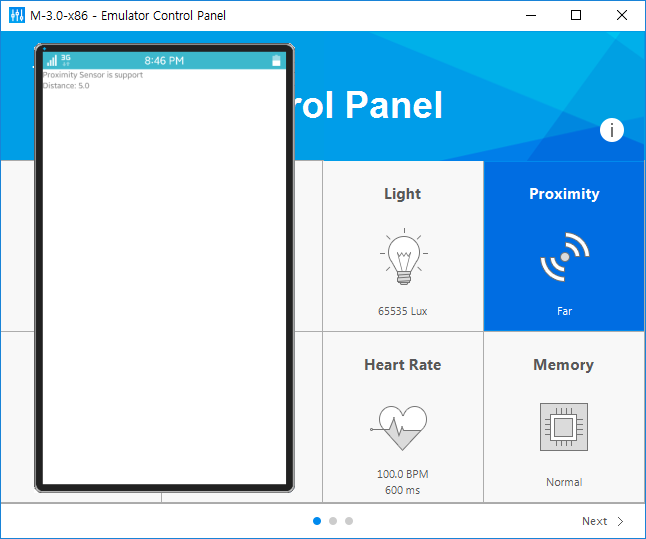
To test on the emulator, use the control panel:
a. Right-click the emulator and select Control Panel.
b. Click Next in the lower-right corner until you see the Proximity box.
c. Click the box to toggle between Far and Near values. The Near value in the control panel makes the second label component on the application screen show 0.0. If you change the value to Far, the label component displays 5.0.